


Wenn es um das Thema Genauigkeit geht, schauen viele Anwender im Sensor-Datenblatt zuerst nach der Auflösung. Die Auflösung gibt die kleinste Änderung an, die der Analogausgang ausgeben kann. Es handelt sich dabei jedoch meist um eine rein technische Größe, denn in der Praxis überwiegen meist andere Einflüsse, wie das Rauschen am Sensorausgang. Aussagekräftiger als die Auflösung ist daher die Wiederholgenauigkeit: Bei wiederholten Messungen am gleichen Ort und am selben Objekt sollte möglichst immer derselbe Wert ausgegeben werden. Eine gute Wiederholgenauigkeit ist somit gleichbedeutend mit einem geringen Rauschen des Sensors.
Nur drei Fehler bei einer Million Messungen
Beim analogen Laser-Distanzsensor FT 55-RLAM von Sensopart betragen die Werte für die Wiederholgenauigkeit je nach Sensorvariante ≤ 60 μm (Arbeitsbereich 600 mm) beziehungsweise ≤ 100 μm (Arbeitsbereich 1000 mm). Dabei handelt es sich um sogenannte 6σ-Ergebnisse (Sechs-Sigma): Dies bedeutet, dass bei einer Million Messungen nur drei bis vier „Ausreißer“ vorkommen.
Wichtig zu wissen: Manche Hersteller geben für die Wiederholgenauigkeit nur 3σ- oder 1σ-Werte an. In diesem Fall würden schon rund 2.700 beziehungsweise sogar 318.000 Werte außerhalb der angegebenen Toleranz liegen – eine solche Angabe ist somit für die Bewertung der Prozessstabilität unbrauchbar.
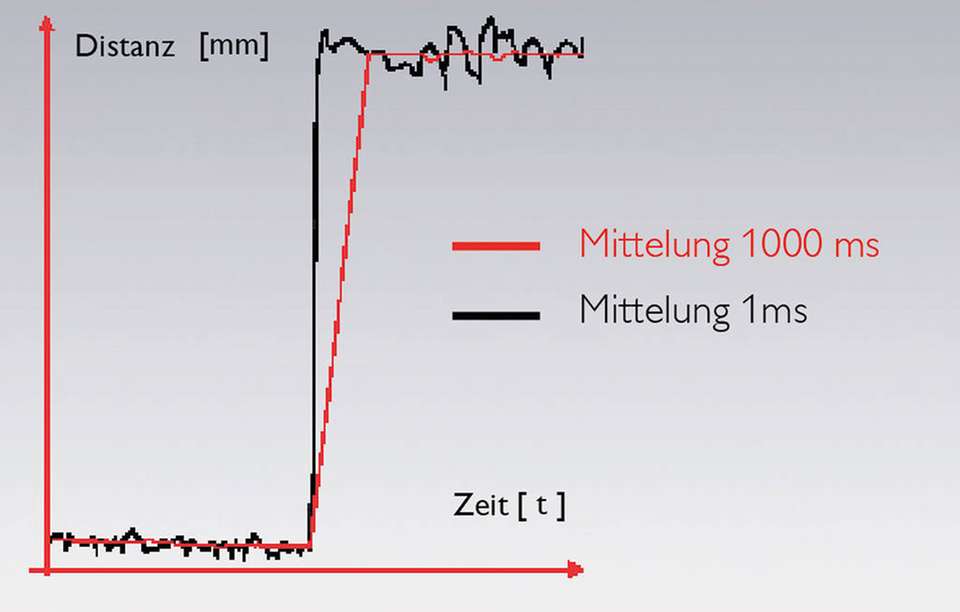
Der ohnehin niedrige Rauschpegel des FT 55-RLAM lässt sich über einen integrierten Mittelwertfilter reduzieren. Es lassen sich Mittelungszeiten zwischen 1 ms (sehr schnell) bis 1000 ms (minimales Rauschen) einstellen. Bei der hier beschriebenen Robotikanwendung würde man eher eine höhere Mittelungszeit – zum Beispiel 100 ms – wählen, was zu einer Glättung des Ausgangssignals führt und so eine präzisere Abstandsmessung ermöglicht.
Einflussgrößen Linearität und Temperatur
Je nach Anwendung kann auch die Linearität der Messung von Bedeutung sein. Sie ist das Maß für die Abweichung zwischen Mess- und Erwartungswert. Bei kleinen Messbereichen ist die Linearitätsabweichung stets geringer als bei großen Abständen, sodass die linearitätsbedingte Abweichung insbesondere für Messungen über einen größeren Messbereich relevant ist.
Sie wird daher üblicherweise in Prozent in Bezug auf die maximale Reichweite angegeben; beim Laser-Distanzsensor FT 55-RLAM mit Arbeitsbereich 600 mm beträgt sie maximal 0,6 mm beziehungsweise 0,1 Prozent bezogen auf den Arbeitsbereichsendwert.
In der praktischen Anwendung sollte außerdem der Temperaturgang beachtet werden. Temperaturbedingte Materialausdehnungen der im Sensor verbauten Komponenten lassen sich zwar durch die Wahl hochwertiger Sensormaterialien (zum Beispiel Glas- statt Kunststofflinse,) sowie eine im Sensor integrierte Kompensationsschaltung reduzieren, aber nicht völlig vermeiden. Beim FT 55-RLAM liegt die temperaturbedingte Messwertabweichung über den gesamten Arbeitsbereich unter 0,01 Prozent pro Kelvin Temperaturunterschied.
Gesamtfehler = quadratische Summe aller Fehler
Muss man nun alle diese möglichen Fehler addieren, um eine realistische Angabe für die Messgenauigkeit zu erhalten? Nein – da nie alle Fehler zur gleichen Zeit auftreten und sich zudem teilweise kompensieren, wird zur Bestimmung der Gesamtgenauigkeit üblicherweise die quadratische Summe (die Quadratwurzel aus den summierten Fehlerquadraten) angesetzt. Für den Distanzsensor FT55-RLAM mit 600 mm Arbeitsbereich würde die Rechnung etwa wie folgt aussehen:
Wiederholgenauigkeit bei Mittelungszeit 100 ms: 0,12 mm
Linearitätsfehler: maximal 0,6 mm
Temperaturgang bei 0,01 % / K und 10 K Temperaturdifferenz: ca. 0,6 mm
Gesamtfehler = quadratische Summe: 0,8 mm
Die resultierende Messabweichung von unter einem Millimeter ist ein sehr guter Wert und für die hier beschriebenen Robotik-Applikationen vollkommen ausreichend. Hinzu kommt, dass dieser Wert beim FT55-RLAM weitgehend unabhängig von der Oberflächenfarbe und -beschaffenheit der Messobjekte erreicht wird – es spielt also kaum eine Rolle, ob das Objekt eine metallisch glänzende, schwarze oder strukturierte Oberfläche hat. Ob das betreffende Objekt sicher erkannt wird, kann der Sensor zudem über ein zusätzliches Ausgangssignal („GoodTarget“) kommunizieren.
Verlustfreie Signalübertragung via IO-Link
Die hohe Messgenauigkeit ist in der Praxis allerdings noch nicht ausreichend – die Messwerte sollen auch in der vorhandenen Qualität bei der Steuerung ankommen. Die Qualität der Signalübertragung kann jedoch durch die mehrstufige Wandlung bei der analogen Übertragung erheblich leiden.
Denn die Signalverarbeitung im Sensor ist digital, aber der Messwert wird am Analogausgang des Sensors als analoger Spannungs- oder Stromwert ausgegeben, der dann steuerungsseitig über eine Analogkarte wieder digitalisiert werden muss. Je nach Qualität der Analogkarte in der Steuerung ergibt sich eine deutliche Minderung der Genauigkeit.
Will man diesen Qualitätsverlust vermeiden, muss eine hochwertige (und entsprechend teure) Analogkarte verwendet werden. Doch es gibt noch eine einfache und kostengünstige Alternative: Wird das Signal am IO-Link-Ausgang des FT55-RLAM abgegriffen und über einen IO-Link-Master an die Steuerung weitergegeben, bleibt die volle Signalqualität erhalten. Die mikrometergenaue Messung von Sensoparts Distanzsensor ist dann in vollem Umfang für die Anwendung nutzbar.



.jpg "6DoF-Sensoren für komplexe Bewegungsanalysen")





