


Es ist allgemein bekannt, dass Autohersteller und große Zulieferer noch einen weiten Weg bis zum voll autonom fahrenden Fahrzeug vor sich haben. Trotz ihres umfangreichen technischen Know-hows ist auch klar, dass sie es nicht alleine schaffen können. Es sind hier so viele komplexe Hard- und Softwaredisziplinen und Wechselwirkungen im Spiel, dass sie zunehmend externe Technologieanbieter einbeziehen, um die Technologieintegration voranzutreiben, die Effizienz ihrer Arbeitsabläufe zu verbessern und die Entwicklungszeiten zu beschleunigen.
Die schiere Komplexität dieses Integrationsaufwandes kann man gar nicht überbewerten. In der laufenden Entwicklung hin zu L4- und L5-Fahrzeugen werden modernste zentralisierte Rechenarchitekturen die Informationsgewinnung und die Entscheidungsfindung in Echtzeit steuern. Das ist notwendig, damit mit KI ausgestattete Fahrzeuge ein Höchstmaß an Sicherheit für Passagiere und Fußgänger gewährleisten.
Diese „Nervenzentren“ müssen von Grund auf neu konzipiert werden, um die strengen Sicherheitsanforderungen zu erfüllen, von der Entwicklung über die Validierung bis hin zum Einsatz. Das Thema Sicherheit kann nicht nachträglich in späteren Entwicklungszyklen angegangen werden, indem man Universal-Prozessoren und Komponenten nachrüstet, die ursprünglich für Konsumelektronikgeräte und Cloud-Rechenzentren entwickelt wurden.
Eine Sicherheitskonformität gemäß den strengen Anforderungen und Standards der Automobilbranche muss vom ersten Tag an in der DNA der Lösung verankert werden. Dies aber erfordert eine enge Zusammenarbeit zwischen Anbietern von Automobilhardware und Softwaretechnologie, um eine nahtlose Integration auf allen Ebenen der Automotive-Computing-Architektur und der damit verbundenen Lieferketten zu gewährleisten.
Offenheit in der Systementwicklung
Autohersteller und große Zulieferer setzen darauf, dass diese wachsende Landschaft von Technologieanbietern sich auf einen gemeinsamen Rahmen verständigt, der auf dem Weg zum autonomen Fahren Sicherheit über alles andere stellt. Letztendlich benötigt man spätestens ab L2 einen klaren, konsistenten Entwicklungspfad, der das Potenzial skalierbarer Embedded-Prozessoren und Softwareressourcen ausschöpft, die nachweisbar kompatibel sind und dazu beitragen, größere Nachentwicklungen von Systemen in den kommenden Jahren zu minimieren.
Eine engmaschige, kollaborative Anbieterlandschaft könnte Autoherstellern und Zulieferern darüber hinaus transparente Einblicke in die jeweiligen Produkt-Roadmaps der Beteiligten eröffnen, sodass schon während der laufenden Entwicklung Elemente für die Zukunftssicherheit fest verankert werden können. Autohersteller und Zulieferer könnten sich beispielsweise auf eine Prozessorplattform einigen, auf der sie ihre Softwareentwicklung sicher aufsetzen können, und das auch dann, wenn sich diese Aktivitäten in den kommenden Jahren weiterentwickeln und ein höheres Maß an Funktionalität umfassen.
Da die Softwareentwicklung rund 70 Prozent der gesamten Projektkosten für OEMs und ihre Zulieferfirmen ausmacht, die sich auf die Entwicklung autonomer Fahrzeuge konzentrieren, sollten alle Anstrengungen unternommen werden, um sicherzustellen, dass der Wert ihrer Investitionen in die Softwareentwicklung so lange wie möglich erhalten bleibt. Die Offenheit der Software und die Portierbarkeit der Codes sind ein wichtiger Schlüssel für solche Aktivitäten.
Systementwickler sollten nicht an „Black Box“-Systeme oder proprietäre Entwicklungsplattformen gebunden sein, die ihre Freiheit in der Entwicklung beziehungsweise eine Differenzierung der von ihnen realisierten Funktionen einschränken würden. Mit offenen, standardbasierten Programmiersprachen und Entwicklungstools erhalten Entwickler die Flexibilität, die sie benötigen, um ihre ehrgeizigen Designziele mit größerer Agilität bei den Arbeitsabläufen und mit geringeren Entwicklungskosten zu erreichen.
Schlüsseltechnologien für autonomes Fahren
Es gibt zahlreiche Technologien, die auf dem Weg zum vollautonomen Fahrzeug gemeinsam zum Tragen kommen müssen. Jede einzelne spielt eine wichtige Rolle und wird letztlich zur Bildung einer nahtlos integrierten, ganzheitlichen Plattform für aktuelle und künftige Entwicklungsaktivitäten zwischen Autoherstellern und Zulieferunternehmen beitragen.
Hier wollen wir einige der wichtigsten Elemente bewerten:
Massive Steigerung der Rechenleistung
Maschinelles Lernen, computergestützte Bildverarbeitung und Sensorfusion werden in autonomen Fahrzeugen der nächsten Generation eine entscheidende Rolle spielen, und diese rechenintensiven Funktionen sind lediglich ein Teil der erforderlichen Datenverarbeitungsprozesse. Um die Rechenkapazität der neuronalen Netzwerke zu erhöhen und die Leistung und Reaktionsfähigkeit der automatisierten Wahrnehmungssysteme zu steigern, wird eine schnelle parallele Datenverarbeitung zu einer zentralen Voraussetzung, damit zeit- und sicherheitskritische Rechenfunktionen durch die gleichzeitige Ausführung mehrerer unabhängiger Aufgabenstränge unterstützt werden können.
Ein sicherheitszertifiziertes Echtzeit-Betriebssystem (RTOS)
Für jede Entwicklungsplattform für autonome Fahrzeuge ist die Sicherheit und Integrität der zugrunde liegenden Betriebssystemsoftware entscheidend, um eine absolute Trennung sicherheitsrelevanter Anwendungen von ebenfalls wichtigen, aber weniger sicherheitsrelevanten Insassenkomfort- und Unterhaltungsanwendungen zu gewährleisten. Ein Absturz der letzteren Domäne darf sich keinesfalls auf die funktionale Sicherheit des Fahrzeugs auswirken. Darüber hinaus sind eine sichere und geschützte Virtualisierung und Hypervisor-Unterstützung auch für das Hosten von Open-Source-Umgebungen und ihren weniger kritischen Anwendungen unerlässlich. Skalierbare Laufzeitumgebungen mit sicheren Partitionen und Multicore-Virtualisierung sind hier von entscheidender Bedeutung.
Bewegungssteuerung und Wegstreckenplanung
Bewegungsplanung ist für die Automatisierung und Planung komplexer Fahrzeugmanöver unter anspruchsvollen Fahrbedingungen bei höheren Geschwindigkeiten unerlässlich, um flüssige Fahrtverläufe und den Komfort der Passagiere zu gewährleisten – ohne Kompromisse in puncto Sicherheit für Autoinsassen und Fußgänger. Dies erfordert eine komplexe, auf physikalischen Kriterien basierende Gesamtlösung, die eine schnelle, automatisierte Entscheidungsfindung auf der Grundlage aller verfügbaren Positionsdaten relativ zu anderen Fahrzeugen und der Straßeninfrastruktur ermöglicht.
Hochpräzise Verkehrs- und Sensorsimulation
Um ihre Entwicklungszyklen zu optimieren, müssen die Entwickler von ADAS-Systemen reale Fahr- und Verkehrsszenarien simulieren, um die Verifizierung, die Validierung und die Entwicklungsumgebungen in einem Labor oder in einer Büroumgebung umsetzen zu können. Ideal wären hier komplexe virtuelle Straßennetze, bei denen Entwickler anspruchsvolle Verkehrsmanöver auf virtuellen Straßen zwischen statischen und beweglichen Objekten wie Verkehrszeichen und Fußgängern definieren können. Bei der Arbeit an ADAS-Systemen setzt dies die Emulation von physikalischen Sensoren – Radar, Lidar und Kameras – mit „Hardware in the Loop“-Testfunktionen (HIL-Testfunktionen) voraus.
Open-Source-Softwareentwicklung
Der Einsatz sicherer autonomer Fahrzeuge in großem Maßstab ist ein kolossales Unterfangen, das starke Synergien zwischen der Entwicklung in Unternehmen, Behörden und akademischer Forschung erfordert. Er erfordert zudem eine stark erweiterte Supportlandschaft für autonome Fahrzeugtechnologien. Organisationen wie die gemeinnützige Autoware Foundation schließen diese Lücken, indem sie Open-Source-Projekte für autonome Mobilität ins Leben rufen, fördern und finanzieren. Von Mitgliedern als Open Source eingebrachte Software-Stacks sind für alle vollständig offen, und die Gruppe entwickelt herstellerunabhängige Software, die auf beliebigen Prozessoren oder SOCs läuft. Die Unterschiede zwischen den einzelnen Angeboten verschiedener Hersteller lassen sich so leichter vergleichen und gegenüberstellen.
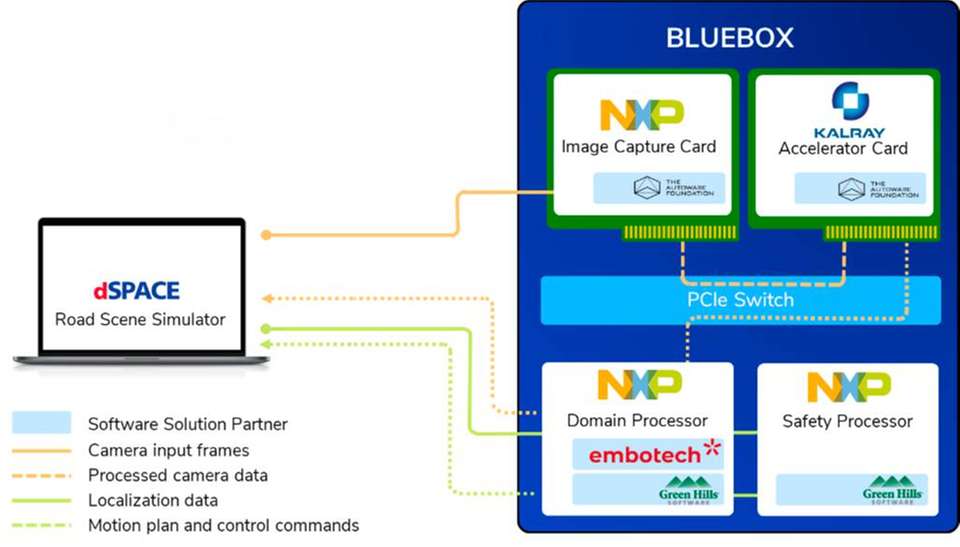
Central Processing Hub
Alle oben genannten Tools, Software- und Hardwarebeschleuniger müssen letztendlich in einer einheitlichen Test- und Entwicklungsplattform unter Integration ASIL-fähiger, nach den Spezifikationen der Automobilindustrie gefertigter Prozessoren harmonieren. Nur so können sie eine optimale Leistung pro Watt und thermische Eigenschaften erreichen, die mit leistungshungrigen Universalprozessorkernen nicht erfüllt werden könnten. Diese Plattform muss zentral über die benötigte Rechenleistung und Konnektivität verfügen, um Bilderkennungs-, Radar- und Lidar-Signalpfade zu bedienen. Gleichzeitig muss sie genügend Leistung liefern, um Fahrumgebungen – im Labor und unterwegs – zu analysieren, Risikofaktoren zu bewerten und das Verhalten des Fahrzeugs zu steuern.
Fortschritt im Eiltempo
NXP hat es sich auf die Fahnen geschrieben, eine wichtige Rolle bei der Realisierung und Inszenierung der oben genannten unterstützenden Technologien zu übernehmen, die Autohersteller und Zulieferer benötigen, um die Entwicklung vollständig autonomer Fahrzeuge zu beschleunigen. Diese Aktivitäten sollen, wie auf der CES 2020 demonstriert, eine präzise Orchestrierung der Fahrzeugsicherheit und der benötigten Rechenkapazitäten auf Basis einer breiten Palette von Entwicklungs-, Test- und Validierungsleistungen gewährleisten. Gleichzeitig sollen sie zu einer unternehmensübergreifenden Vision für die Zukunft der automobilen Sicherheit beitragen.
.jpg "6DoF-Sensoren für komplexe Bewegungsanalysen")








