



In der einschlägigen Literatur bekommen Hardwareentwickler allerlei Tipps zum Design von Schaltreglern. Das umfasst sowohl die Auswahl der passenden Speicherinduktivitäten, Ein- und Ausgangskondensatoren, MOSFETs und Schottky-Dioden als auch PCB-Layoutvorschlägen. Sie zeigt außerdem, wie sich ein EMV-konformes Design realisieren lässt. Allerdings findet man nur selten EMV-Vergleichsmessungen, welche die Wirksamkeit der getroffenen Maßnahmen belegen. Da aber so gut wie jede moderne Leiterplatte in irgendeiner Form DC/DC-Konverter enthält, ist ein Vorher-nachher-Vergleich der EMV-Messungen an diskret aufgebauten DC/DC-Konvertern für fast jeden Entwickler von großem Interesse.
Verschiedene Störarten
Um die Ausbreitung von Störungen zu verstehen, muss man zuerst unterscheiden, um welche Art von Störer es sich handelt, und die Kopplungswege entsprechend identifizieren. Dabei wird zwischen zwei Arten von Störsignalen unterschieden:
Beim Gleichtaktsignal (englisch: Common Mode) ist der Strom in Phase. Der Störstromkreis schließt sich über die Erde. Die Entstörung erfolgt über eine stromkompensierte Drossel.
Beim Gegentaktsignal (Differential Mode) ist der Strom um 180° phasenverschoben. Der Störstromkreis schließt sich über Hin- und Rückleiter. Die Entstörung erfolgt mit Hilfe von LC-, T-, Π-Filtern.
Um ein EMV-konformes Layout zu gestalten, muss man wissen, wo und warum die entsprechenden EMV-Störungen entstehen können. Messungen der Störfeldstärke in der EMV-Kammer (zum Beispiel nach EN 61000-4-3) zeigen bei Schaltreglern oft ein breitbandiges Störspektrum zwischen 30 und 400 MHz. Die Ursache dafür ist unter anderem die steile MOSFET-Schaltflanke – je nach Anstiegszeit ist ein Frequenzspektrum bis einige hundert MHz nicht ungewöhnlich. Dadurch bilden beispielsweise die MOSFET-Ausgangskapazität CDS, die Junction-Kapazität und die Reverse-Recovery-Kapazität der Schottky-Diode gemeinsam mit den parasitären Leiterbahninduktivitäten hochfrequente LC-Schwingkreise.
Falls einzelne Masse-Leiterbahnen nicht niederimpedant gehalten sind oder falls einzelne Leiterbahnzüge zwei Ströme führen und dadurch an der gemeinsamen Impedanz verkoppeln, muss im Design mit Common-Mode-Störungen gerechnet werden. Diese Störungen koppeln dann kapazitiv in Richtung Störquelle aus, um den Störstromkreis hochfrequent zu schließen. Bei der Störspannungsmessung (zum Beispiel nach CISPR 16-2-1) kann die eigentliche Schaltfrequenz des Reglers und deren Oberwellen meist bis 10 MHz beobachtet werden. Die Wellen treten je nach Schirmung und Leitungslänge als eine Mischung von Common- und Differential-Mode-Störern auf. Die Ursache für die Differential-Mode-Störung liegt unter anderem in der diskontinuierlichen Stromaufnahme des MOSFETs, was einen Spannungsabfall am ESR der Ein- oder Ausgangskondensatoren verursacht.
Boost- und Buck-Konverter
Unabhängig von den verwendeten Bauteilen und dem Layout muss man wissen, dass sich die Schaltregler-Topologien dahingehend unterscheiden, ob sie potentiell eher am Eingang oder am Ausgang Störungen verursachen. Beim sogenannten Boost-Konverter ist der Ausgang kritischer, weil dort die Speicherdrossel als „Strombremse“ zwischen dem MOSFET und dem Eingang sitzt. Beim Buck-Konverter ist hingegen der Eingang kritischer, weil bei dieser Topologie die Speicherdrossel zwischen MOSFET und Ausgang sitzt. Offensichtlich benötigt der Buck-Konverter einen Eingangsfilter und der Boost-Konverter potentiell einen Ausgangsfilter, um diskontinuierliche Stromverläufe zu dämpfen.
Dämpfung von 40 dB pro Dekade
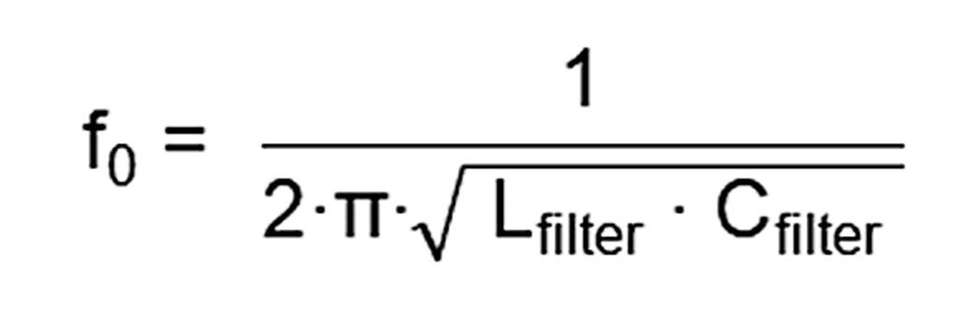
Beginnen wir mit den Eingangsfiltern. Bei modernen Konvertern sind Schaltfrequenzen von 250 kHz bis 4 MHz üblich. Um die Grundwelle und deren Oberwellen in den Griff zu bekommen, eignen sich LC-Filter besonders gut. Mit diesen Filtern erreicht man eine Dämpfung von bis zu 40 dB pro Dekade. Außerdem lassen sich damit Filtereckfrequenzen bis in den niedrigen kHz-Bereich realisieren. Die Formel für die Resonanzfrequenz f0 des Filters finden Sie in Bild 5.
In der Praxis hat es sich bewährt, dass die Eckfrequenz des Filters bei circa einem Zehntel der Schaltregler-Frequenz liegt: Damit lassen sich bei der Schaltfrequenz (Grundwelle) etwa 40 dB Dämpfung der Spektralamplitude erreichen. Falls sich mit diesem Wert die EMV-Pegel nicht einhalten lassen, muss die Eckfrequenz weiter gesenkt werden. Dies zieht allerdings größere Bauelemente beziehungsweise einen schlechteren RDC bei der Filterinduktivität nach sich.
Auswahlkriterien für Filterinduktivitäten
Mögliche Auswahlkriterien für die Filterinduktivitäten sind die maximale Stromtragfähigkeit und die Eigenresonanzfrequenz (SRF), welche über dem zu filternden Spektrum liegen sollte. Da die SRF produktionsbedingt abweichen kann, sollte man immer im Frequenzbereich mit induktiv bestimmter Spulenimpedanz bleiben, mit ausreichendem Abstand zur SRF. Wer die Impedanz des Eingangsfilters vor allem im Frequenzbereich über 10 MHz erhöhen möchte, kann den LC-Filter um einen pulsstrombelastbaren Ferrit der WE-MPSB-Serie ergänzen, um DC-Stromversorgungen hochfrequent zu entstören. In diesem Fall können die Induktivität und der Kondensator etwas kleiner dimensioniert werden. Als Filterkondensatoren empfehlen sich kleine SMD-Elektrolytkondensatoren mit Werten von 10 bis 100 µF. Grundsätzlich sollte die Filterinduktivität möglichst klein gehalten und dafür die Filterkapazität vergrößert werden. Diese Maßnahme wirkt sich positiv auf den Wirkungsgrad aus.
MLCCs als Eingangskondensatoren
Werden MLCCs als Eingangskondensatoren eingesetzt und mit einer Filterinduktivität oder einer parasitären Zuleitungsinduktivität kombiniert, können bei Spannungstransienten (zum Beispiel einem Absinken der Eingangsspannung) Oszillationen am Eingang des Schaltreglers auftreten. Diese werden durch den sogenannten negativen Eingangswiderstand ausgelöst. Da eine negative Impedanz Energie nicht absorbiert, sondern im Gegenteil Energie liefern kann, entstehen gemeinsam mit den parasitären und absichtlich eingesetzten Induktivitäten beste Voraussetzungen für einen unerwünschten Schwingkreis. Der durch die Filterinduktivität und den MLCC-Eingangskondensator erzeugte LC-Schwingkreis weist eine hohe Resonanzüberhöhung auf. Er speist sich aus der Restenergie, die der Konverter während der Transiente nicht aufnimmt. Die Formel dazu finden Sie in Bild 6.
Die negative Eingangsimpedanz kann zu mehreren Problemen führen:
Wenn sich ihr Frequenzbereich mit der Bandbreite der Regelschleife überschneidet, ist die Regelschleifenstabilität des Ausgangs gefährdet.
Bei Resonanz sind Spannungsüberhöhungen möglich, wodurch aktive und passive Bauelemente beschädigt werden können.
Sie kann weitere EMV-Störer verursachen.
Aktive Dämpfung des Schwingkreises
Die aktuell beste Methode zur Vermeidung dieser unerwünschten Effekte besteht darin, den LC-Schwingkreis aktiv zu dämpfen. Bewerkstelligen lässt sich dies mit Hilfe eines SMD-Widerstands (geringe Eigeninduktivität) in Reihe zu einem Kondensator, der die DC-Spannung blockt. Bei der Auslegung sollte eine Schwingkreisgüte von Q = 1 oder ein Dämpfungsfaktor von ζ = 0,707 gewählt werden. Oft wird stattdessen auch ein Elko mit entsprechend hohem ESR eingesetzt. Die Stabilitätskriterien finden Sie in Bild 7.
Der Dämpfungskondensator muss bei der Resonanzfrequenz von Cin und Lfilter eine geringere Impedanz aufweisen, damit der Widerstand die Resonanzüberhöhung des Filters effektiv dämpfen kann. Daher sollte Cdamp etwa viermal größer als Cin sein. Ein Dämpfungsfaktor ζ von 0,707 ist ausreichend, wobei gilt (Bild 8):
Für den Widerstand Rdamp sind je nach Güte Werte zwischen 0,1 und 4,7 Ω gängig. Mit Hilfe einer Stromzange lässt sich ganz einfach feststellen, ob eine stabile Auslegung erreicht ist. Dazu muss man die Stromamplitude im Eingangskondensator über den gesamten Dynamikbereich des Konverters hinweg beobachten. Entspricht der Stromverlauf den zu erwartenden Transienten durch den Eingangskondensator, ist der Konverter stabil. Tritt jedoch eine zu hohe Amplitude auf, die nicht mit dem prognostizierten Betrieb übereinstimmt, muss entsprechend gedämpft werden.
Restwelligkeit der Ausgangsspannung
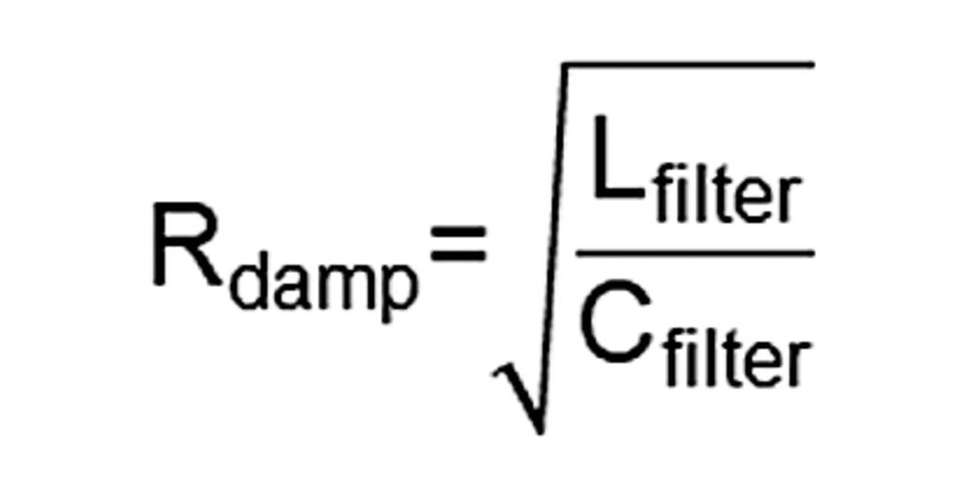
Abschließend noch ein Wort zu Ausgangsfiltern. Diese werden oft eingesetzt, um die Restwelligkeit der Ausgangsspannung noch weiter zu verringern. Wenn der Spannungsabfall über der Filterinduktivität nicht ignoriert werden kann, muss die Ausgangsspannung nach diesem Filter und nicht wie üblich am Ausgangskondensator abgegriffen werden. Für den Dämpfungswiderstand des Ausgangsfilters gilt folgende Formel, die Sie in Bild 9 finden.
Typische Werte für eine Filterinduktivität am Ausgang sind 0,47 bis 2,2 µH. Zudem sollte RDC klein und die Eigenresonanzfrequenz möglichst hoch sein. Außerdem muss man darauf achten, dass Rdamp deutlich größer ist als der RDC der Filterinduktivität, um die Dämpfung des Filters nicht zu verringern. Auf der Website sind weitere Layoutempfehlungen hinterlegt. Dort findet sich auch ein Vergleich zwischen einem EMV-kritischen und einem EMV-unkritischen Design, inklusive der Messungen für die Störspannung am Ein- und Ausgang des Boost-Konverters.