Um diese Sensoren auch praxistauglich und kostenoptimiert realisieren zu können, ist der Einsatz von integrierten Controllern erforderlich. Sie vereinen geeignete Schnittstellen zur mehrkanaligen Radar-Signalerfassung mit der notwendigen Speicherkapazität für die anfallenden Rohdatenmengen und ausreichender Rechenleistung für die Datenauswertung auf einem Chip. Die Signale der Radar-Antenne werden damit im chipinternen AD-Wandler mit bis zu 320 MBit/sec digitalisiert, gespeichert, verarbeitet, ausgewertet und verlassen den Chip erst wieder in abstrahierter Form, so dass sie problemlos auch über langsame Schnittstellen wie CAN weitergegeben werden können.
So elegant und effizient der voll integrierte Aufbau im endgültigen Produkt ist, so tückisch ist er für die Entwicklungsteams: zur anspruchsvollen Aufgabe, einen so komplexen Chip optimal zu programmieren, kommt noch die Problematik, dass die Radar-Rohdaten den Chip nie verlassen. Die Chips verfügen über keine Kommunikationsschnittstelle, die schnell genug ist, um diesen Datenstrom in Echtzeit auszugeben. Aber wie kann ein Algorithmus zur Datenaufbereitung entwickelt und vor allem verifiziert werden, wenn die zugehörigen Rohdaten nicht extern analysiert werden können?
Chip-Problematiken ausmerzen
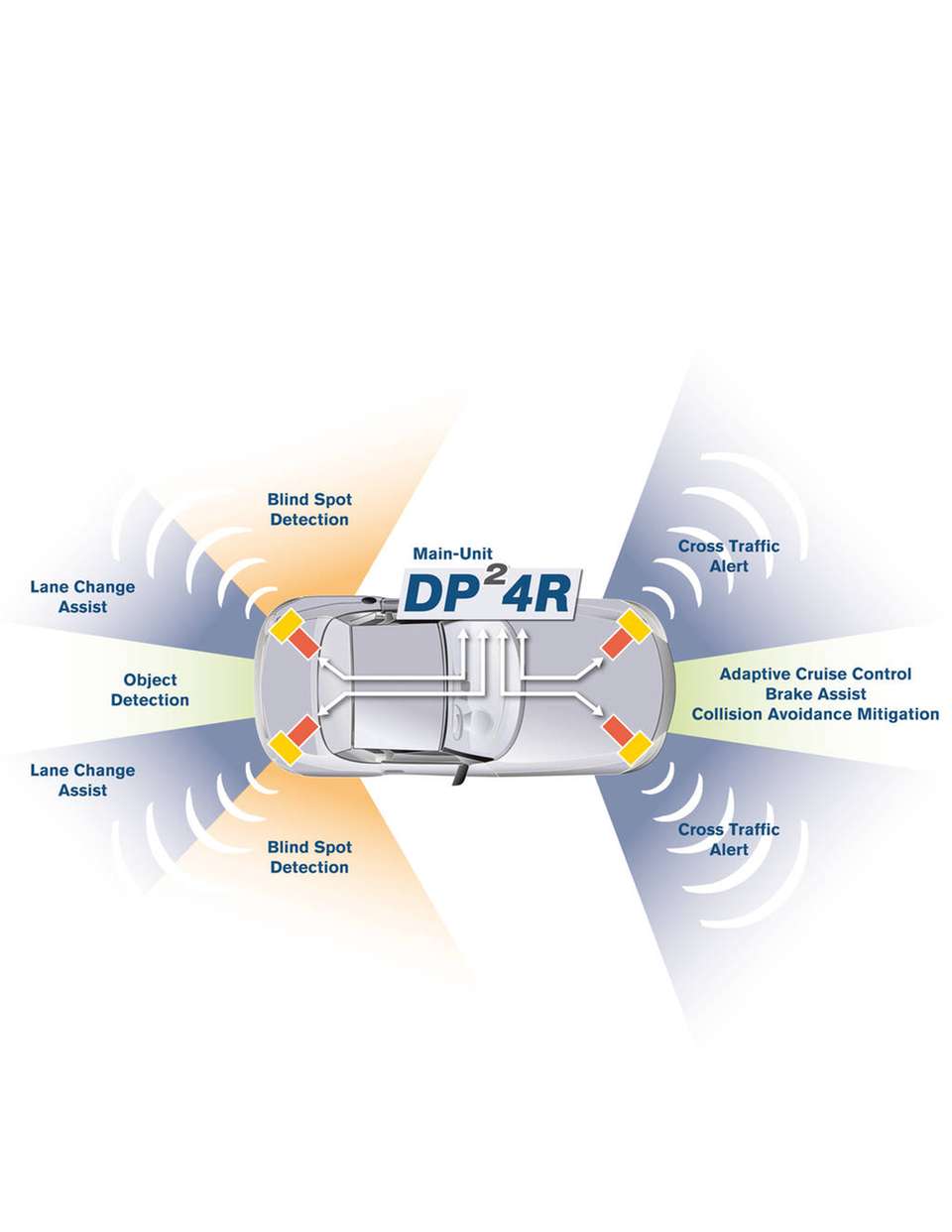
Sehr aussagekräftig für den Entwicklungszyklus sind reale Testfahrten. Nur im Einsatz unter realen Bedingungen kann geprüft werden, ob die Sensoren alle relevanten Objekte im Erfassungsfeld wirklich erkennen, klassifizieren und verfolgen können. Wo befinden sich Fahrbahn, feste Begrenzungen und Hindernisse, welche Objekte bewegen sich im Umfeld, wo sind potentielle Gefahrensituationen? Ist die Hardware empfindlich genug, um gut auswertbare Rohdaten zu liefern? Sind die Algorithmen fein genug abgestimmt, um nicht nur Fahrzeuge in der Nähe, sondern auch weiter entfernte Objekte zu erkennen? Wie gut gelingt die Trennung benachbarter Objekte? Und wie stark beeinflusst die Witterung die Resultate?
Mit Testfahrten kritische Situationen meistern
Testfahrzeuge sind viele Stunden unterwegs, um eine ausreichende Anzahl kritischer Situationen durchfahren zu können. Die Erkennungsrate der Sensoren kann damit zwar punktuell bewertet werden, aber mehr Resultate liefert eine Testfahrt nicht. Wird ein Objekt nicht oder nicht richtig erkannt, so ist das Entwicklerteam erst einmal auf Mutmaßungen angewiesen, wo in der Auswertung der Fehler liegt. Und noch schlimmer: Nach einer Verbesserung der Algorithmen gibt es keine Möglichkeit, dieselbe Fahrsituation noch einmal durch zu spielen.
Entsprechend intelligente Sensorsysteme sind in Entwicklung und auch schon in einigen Fahrzeugen im Einsatz. Optische Kamerasysteme, laserbasierte LIDARs und Sensoren auf Radar-Basis haben unterschiedliche Stärken und ergänzen sich in modernen Fahrzeugen. Wer die extrem hohen Anforderungen an die Zuverlässigkeit der Objekterkennung ernst nimmt und sich der Komplexität der Sensorsysteme bewusst ist, befasst sich frühzeitig mit der methodischen Validierung dieser Systeme. Im Hinblick auf den Projektzeitplan, ist die Effizienz der Validierung sogar entscheidend für den Projekterfolg.
DP24R-Datenlogger schafft Transparenz
Um den Entwicklerteams die erforderliche Transparenz zu ermöglichen, ist der Einsatz innovativer Systeme wie dem DP24R-Datenlogger erforderlich. Dieses System wurde von Grund auf konzipiert, um im Automotivumfeld Daten verteilt, mit hoher Bandbreite zu erfassen, zentral zu speichern und für die Offline-Verarbeitung bereitzustellen. Der DP24R ermöglicht es, während einer Testfahrt gleichzeitig bei bis zu vier Sensor-Einheiten beliebige Daten abzuziehen, an den zentralen DP2 Controller zu übertragen, dort lückenlos zu speichern und nach Abschluss der Fahrt extern auszuwerten. Pro Sensor können dabei 320MBit/sec erfasst werden. Aber nicht nur die Sensordaten werden erfasst, zusätzlich kann die Testfahrt auch automatisch dokumentiert werden. Bei Bedarf können laufend sowohl die GPS-Koordinaten als auch ein Kameravideo mit gespeichert werden, das die Fahrsituationen aufzeichnet. Dies erleichtert später die Auswertung der Daten, damit ist sichtbar, was sich auf der Straße abgespielt hat.
Kontinuierliche Datenerfassung
Wie kann ein solches System funktionieren? Die Lösung liegt in der Aufteilung des DP24R-Systems und seiner nahtlosen Integration in die Sensor-Hardware. An jedem Radarsensor-System sitzt dezentral ein spezialisierter, nur etwa 40x60mm großer Erfassungskopf (DP24R-Head-Unit). Er verfügt sowohl über ein FPGA zur Datenerfassung und -formatierung als auch über ein lokales RAM als Zwischenspeicher. Das Layout des Erfassungskopfes wird jeweils speziell für die Hauptplatine des Radar-Sensors angepasst und als Piggyback-Einheit auf diese aufgesteckt. Er koppelt sich dabei mit dem High-Speed-Debuginterface des zentralen Mikrocon-
trollers. Damit können über das Debug-Interface sowohl die Radar-Rohdaten als auch weitere notwendige Informationen kontinuierlich abgezogen werden.
Synchrone Speicherung unterschiedlicher Daten
Das Herzstück des DP24R-Datenloggers ist der DP2 Controller, der sowohl für die Datenspeicherung als auch für die gesamte Steuerung verantwortlich ist. Die gesammelten Nutzdaten werden von den Erfassungsköpfen als serieller LVDS-Strom an den DP2-Controller übertragen, die Verbindungen dazu können bis zu 7 Meter lang sein. Bis zu vier Head-Units lassen sich an einen DP2-Controller ankoppeln, es können also gleichzeitig und synchron die Daten von vier Radar-Sensoren gesammelt und auf wechselbaren SSD-Massenspeichern gespeichert werden.
Auswertungsalgorithmen besser abstimmen
Die Daten können auf handelsüblichen Network Attached Storage (NAS)-Systemen am Entwicklungsstandort gespeichert werden. Allerdings werden hierfür hohe Kapazitäten benötigt. Ein Jahr lückenlose Aufzeichnung benötigt eine Speicherkapazität im einstelligen Petabyte-Bereich. Der elegante Weg, um die Daten vom Testfahrzeug zum NAS zu transportieren, wäre ein Netzwerkinterface. Allerdings ist damit die praktisch erzielbare Datenrate auf etwa 10Gbit/sec begrenzt. So lohnt es sich, stattdessen auf den guten alten Turnschuhbus umzusatteln. Hierbei werden die SSDs manuell aus der Erfassungs-Zentraleinheit entnommen und direkt ins NAS eingesetzt. Bei fünf Minuten Fußweg vom Fahrzeug zum NAS und zwei SSDs mit je acht TByte Kapazität entspricht das einer Datenrate von etwa 430 Gbit/sec, mit Netzwerkkabeln ist das kaum zu übertreffen. Damit liegen die auf den Testfahrten gesammelten Daten bereit zur weiteren Nutzung, Aufbereitung und Auswertung.
Aus den stundenlangen Aufzeichnungen müssen dann Situationen extrahiert werden, die näher untersucht werden sollen. Erleichtert wird dies durch lückenlose Zeitmarken und Kameraprotokolle der Testfahrten. Aufbauend können die Entwicklerteams dann die ursprünglichen Simulationsmodelle mit den relevanten Rohdaten versorgen und das Verhalten der Sensoren nachvollziehen. Auswertungs-Algorithmen können so zukünftig noch besser abzustimmen werden.
Daten-Bibliothek kritischer Fahrsituationen
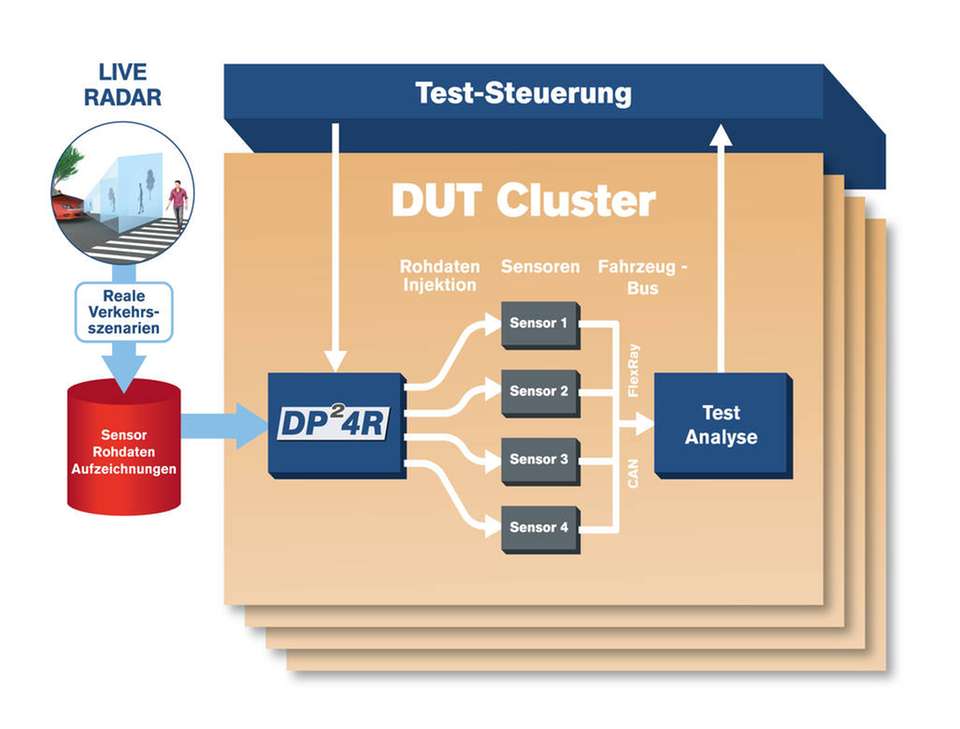
Ein angepasstes Softwareupdate macht die Sensoren fit für die nächsten Tests. Und hier spielt der DP24R einen Trumpf aus. Denn im Injection Mode kann das System verwendet werden, um die ursprünglich erfassten Radar-Rohdaten wieder in die Sensoren einzuspeisen.
In einer Art Virtual Reality durchfahren die Sensoren die vorher erlebten Situationen erneut, können jetzt aber zeigen, was sie durch das Softwareupdate gelernt haben. Für die systematische Verifikation der Systeme ist das ein entscheidendes Hilfsmittel, vor allem da man mit der Zeit eine Daten-Bibliothek der kritischen Fahrsituationen aufbauen kann.
Validierung mit realen Fahrdaten ist essentiell
Intelligente Sensorsysteme als Basis der Fahrzeuge von morgen stellen große Herausforderungen an die Validierung und Qualitätssicherung der Software. Eine Validierung auf Basis von realen Fahrdaten ist schon aus versicherungstechnischen Gründen essentiell und erlaubt bereits vor der Markteinführung verlässliche Aussagen über die Robustheit der Sensorik.
Verfahren und Systeme hierzu stehen bereit und sind damit als Stand der Technik zu betrachten. Deren Integration sollte frühzeitig in den Entwicklungsprojekten berücksichtigt werden, um die Projektziele rechtzeitig, mit der gebotenen Sorgfalt und sicher zu erreichen.