




Fahrzeug-Scheinwerfer haben sich schnell weiterentwickelt, seitdem vor einigen Jahren die LED- und Laserdioden-Technik eingeführt wurde. LED-Lampen mit einem Laserkanal, die in der Regel mit adaptiven Frontleuchten (AFS) oder Matrix Beam ausgestattet sind, werden bei OEMs immer beliebter. Das liegt nicht nur daran, dass sie energiesparend sind. Sie sind zudem blendfrei und vergrößern die Leuchtweite. Vor allem in Europa werden sie immer häufiger verbaut, da große Fahrzeughersteller wie BMW und Audi sowie LED-Zulieferer wie OSRAM die Technik unterstützen.
Das Herzstück der LED-Leuchte
Ein entscheidender Bestandteil eines LED-Scheinwerfers mit Lasertechnik ist das Lichtsteuergerät (Light Control Unit, LCU). Zu dessen Funktionen zählen die laserbasierte Beleuchtung, AFS (Adaptive Frontlightning System), dynamische Nivellierung oder Matrix-Funktionen. Das Treibermodul besteht aus einem Mikrocontroller (MCU) und Transceivern, beziehungsweise einem System Basis Chip (SBC), die mit dem Body-Control-Modul (BCM) über ein Fahrzeug Netzwerk kommunizieren. Die MCU steuert den Treiber-IC über die SPI-Schnittstelle (Serial Peripheral Interface). In der Leistungselektronik wird oft eine zweistufige Topologie verwendet. Dazu zählen ein Boost-Spannungsregler und unabhängige Buck-Kanäle, um die LEDs oder Laserdioden für die verschiedenen Beleuchtungsfunktionen anzusteuern.
Besonderheit von Buck-Kanälen
Eine solche zweistufige Topologie stellt eine stabile Spannungsquelle bei verschiedenen Zuständen dar, zum Beispiel bei einem Load-Dump und beim Anlassen, während sie weiterhin auf eine dynamische Last in jeder Stufe reagiert. Diese Funktion ist in Matrix- oder LED-Scheinwerfern entscheidend. Bei ihnen wird die Auswahl externer Bauteile für verschiedene Buck-Kanäle oft mit unterschiedlichen optimalen Parametern konfrontiert. Zum Beispiel weisen Buck-Kanäle, die ein Tagfahrlicht (Daytime Running Light, DRL) ansteuern, einen relativ niedrigen Ausgangsstrom von 0,2 bis 1 A auf – dafür aber eine hohe Spannung.
Boost-Spannung im Griff
Daher sind die MOSFET-Drain-Source-Spannung (UDS) und der Dioden-Sperrstrom von Bedeutung. Allerdings haben Buck-Kanäle, die Laserkanäle ansteuern, einen Ausgangsstrom von mehr als 1 A, aber eine niedrige Flussspannung (UF). Aus diesem Grund sind der Drain-Source-Durchlasswiderstand (RDS(on)) des MOSFETs, der Gleichstromwiderstand (DCR) der Induktivität und die Dioden-Durchlassspannung wichtiger. Mit nur einer einzigen Boost-Spannung wäre es schwierig, alle diese Kanäle anzusteuern. Mit der beschriebenen Lösung ist es möglich, zwei Boost-Spannungen oder sogar eine Boost- und eine SEPIC-Spannung mit einem einzigen Controller bereitzustellen. Ein Vorteil dabei ist der leistungsfähige, digitale Regelkreis.
Zwei Design-Ansätze
Zwei Anwendungsfälle werden im Folgenden aufgezeigt, die einen höheren Wirkungsgrad des Systems und des Laserkanals ermöglichen. Im ersten Anwendungsfall verfügt der LCU über eine Leistung von 60 W und drei Lastgruppen: ein DRL mit 54 V und 540 mA, einen Nebelscheinwerfer mit 16 V und 0,5 A und ein Lasermodul mit 8 V und 2 A. Die im obigen Bild zu sehende Lösung 1 soll eine 63-V-Spannungserhöhung für alle drei Buck-Gruppen bieten. Es ist einfacher, einen MOSFET und eine Induktivität zu entwerfen, indem zwei Phasen des Verstärkers parallel zur Ansteuerung verwendet werden. Lösung 2, ebenfalls im Bild auf der vorherigen Seite zu sehen, umfasst das Design einer 63-V-Spannungserhöhung für das DRL und eine weitere 35-V-Spannungserhöhung für die Nebelscheinwerfer und das Lasermodul.
Als Steuerungs-IC wird ein ASL2500 von NXP verwendet. Dieser verfügt über zwei unabhängige interne Regelkreise und gilt als virtuelle Phasenlogik 1 und virtuelle Phasenlogik 2. Zwei physikalische Gate-Treiber können mit einer internen virtuellen Phase verbunden sein, indem verschiedene Phasenzuweisungsregister über die SPI programmiert werden, ohne dass zusätzliche Komponenten für das Ermitteln von Zuordnungen erforderlich sind. Die Boost-Gate-Treiber können eine gemeinsame Ausgangsspannung zusammen oder zwei getrennte Ausgangsspannungen ansteuern.
Wirkungsgrad erhöhen
Betrachtet man den Wirkungsgrad zeigt sich, das Lösung 2 einen um 3 Prozent höheren aufweist als Lösung 1. Das entspricht einer um 1,8 W geringeren Verlustleistung (Wärme) in einem 60-W-LCU-Design. Bei der geringen Größe der LCU, ist das für ein einfacheres Thermal Design von großem Vorteil.
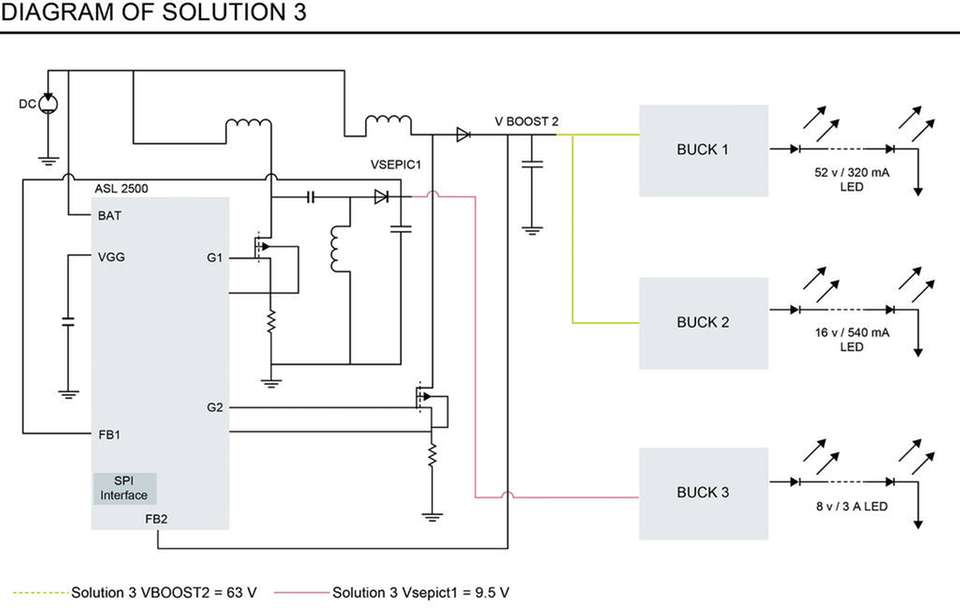
Im zweiten Beispiel sind drei Lastgruppen an ein Lichtsteuergerät mit einer Leistung von 60 W angeschlossen: ein DRL mit 52 V und 320 mA, ein Nebelscheinwerfer mit 15 V und 0,55 mA und ein Lasermodul mit 8 V und 3 A. Die in obigen Bild gezeigte Lösung 3 ist der Entwurf einer 63-V-Spannungserhöhung für das DRL und eines SEPIC mit 9,5 V für das Lasermodul. Sie ist eine interessante Option, wenn der Ausgangsstrom des Laserkanals 3 A oder mehr beträgt.
Die ASL2500-Register enthalten eine umfangreiche Anzahl an Schleifenkompensationsparametern (Kp, Ki). Die Frequenz wird von 125 bis 700 kHz über SPI eingestellt. Das macht unter bestimmten Lastbedingungen eine Konfiguration als
SEPIC-Wandler möglich. In diesem Beispiel kann der SEPIC-Wandler die Laser-
diode ansteuern, da er eine höhere oder niedrigere Batteriespannung als seine Aus-
gangsspannung erlaubt. Bei der Boost-Topologie ist die Ausgangsspannung höher als die maximale Batteriespannung. Sie kann beispielsweise auf 35 V eingestellt werden. Das optimiert den Tastgrad des Buck-Kanals, so dass sich der Leistungsverlust in der Buck-Freilaufdiode minimiert. Der Buck-3-Wirkungsgrad ist daher nahe an dem des Sync Bucks, dessen Topologie einen Low-Side-MOSFET verwendet, um die Freilaufdiode zu ersetzen. Der Buck 3 arbeitet mit einem hohen Tast-
grad, wobei die Freilaufdiode (D1) die meiste Zeit ausgeschaltet ist.
Bei einem SEPIC als erster Stufe in Lösung 3 kann ein 40- oder sogar 30-V-MOFSET mit niedriger Gate-Ladung und geringem Durchlasswiderstand verwendet werden. Bei einem 30-V-Schottky-Barrier-Gleichrichter sind sowohl UF als auch der Sperrstrom niedriger als bei seinem 60- oder 100-V-Gegenstück. Für die Buck-Induktivität sind die AC- und DC-Verluste kleiner. Hinzu kommt, dass die Kosten und die Größe der Buck-Lösung 3 geringer ausfallen.
Immer mehr Fahrzeug-Scheinwerfer werden mit LED-Leuchten und Laser-Funktionen oder Matrix-Beam ausgestattet. Dafür gibt es drei Gründe: sie sparen Energie, sind blendfrei und verlängern die Reichweite des Lichts. Die LED-Treiber von NXP bieten die passende Technik für das LCU-Design. Das ist bei der Entwicklung flexibler Plattformen, die Lasten effizient kombinieren können, von entscheidender Bedeutung. Damit lassen sich die Vorteile der LED-Beleuchtung umfassend nutzen.