

Flexible und adaptive Mikroelektronik gilt als Innovationstreiber für neue und effektive biomedizinische Anwendungen. Internationale Wissenschaftler haben nun erstmals eine solche Mikroelektronik entwickelt, die sich kontrolliert positionieren, biologisches Gewebe manipulieren und auf ihre Umgebung reagieren kann. Bisher war es nicht möglich, dass mikroelektronische Strukturen sowohl ihre Umgebung wahrnehmen als auch sich daran anpassen können.
Zwar gibt es bereits Strukturen mit einem Dehnungssensor, die ihre eigene Form überwachen, Mikroelektronik mit magnetischen Sensoren, die sich im Raum orientieren, oder Geräte, deren Bewegung durch elektroaktive Polymerstrukturen gesteuert werden können. Eine Kombination dieser Eigenschaften im Mikrometerbereich aber war noch nicht gelungen – bis jetzt.
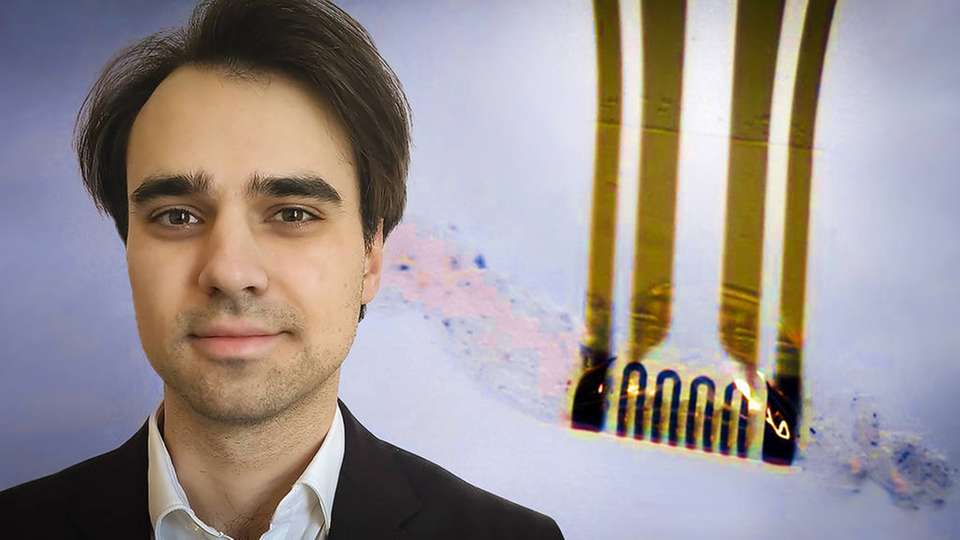
Aufbau der intelligenten Mikroelektronik
Entwickelt hat die adaptive Mikroelektronik ein Team um Prof. Dr. Oliver G. Schmidt, Leiter des Instituts für Integrative Nanowissenschaften am Leibniz-Institut für Festkörper- und Werkstoffforschung Dresden, und Boris Rivkin, Doktorand in der Forschungsgruppe von Schmidt. Ihre Grundlage bildet eine 0,5 mm x 0,35 mm große Polymerfolie, die als Träger für die mikroelektronischen Komponenten fungiert.
Für das Verformen sorgen mikroskopisch kleine künstliche Muskeln; die Umgebung erfassen Sensoren. Über elektrische Verbindungen gelangen diese Sensorsignale an einen Mikrocontroller, wo sie ausgewertet und genutzt werden, um Steuersignale für die künstlichen Muskeln zu erzeugen.
Auf diese Weise können die Miniatur-Werkzeuge sich auch an komplexe und unvorhersehbare anatomische Formen anpassen. Nervenbündel zum Beispiel sind immer unterschiedlich groß. Die adaptive Mikroelektronik ermöglicht es, diese Nervenbündel schonend zu umschließen, um ein geeignetes bioneurales Interface herzustellen.
Wesentlich dafür ist die Integration von Form- oder Positionssensoren in Kombination mit Mikroaktuatoren. Idealerweise wird die adaptive Mikroelektronik daher in einem sogenannten monolithischen Wafer-Scale-Prozess hergestellt: Durch die monolithische Fertigung lassen sich viele Bauteile gleichzeitig auf einer Unterlage produzieren, was eine schnelle und zugleich kostengünstigere Fertigung erlaubt.
Einsatz in organischer Umgebung
Die künstlichen Muskeln oder Aktuatoren erzeugen durch den Ausstoß oder die Absorption von Ionen eine Bewegung und verformen so die Polymerfolie. Grundlage dieses Prozesses ist der Einsatz des Polymers Polypyrrol (PPy). Dessen Vorteil besteht darin, dass eine Manipulation der Form gezielt und mit bereits sehr kleiner Vorspannung (unter 1 V) erfolgen kann.
Dass künstliche Muskeln für den Einsatz in organischen Umgebungen geeignet sind, zeigten bereits andere Gruppen. Dabei wurde die Leistungsfähigkeit der Mikromaschinen in verschiedenen medizinisch relevanten Umgebungen getestet, darunter Hirnflüssigkeit, Blut, Plasma und Urin.
Grundlage für komplexere Mikroroboter
Das Team aus Dresden und Chemnitz erwartet, dass ihre intelligente Mikroelektronik mittelfristig zu komplexen robotischen Mikrosystemen entwickelt wird. Dazu Rivkin: „Der entscheidende nächste Schritt ist der Übergang von der bisher flachen Architektur zu dreidimensionalen Mikrorobotern. In früheren Arbeiten wurde demonstriert, wie sich flache Polymerfolien durch selbstorganisiertes Falten oder Rollen zu dreidimensionalen Strukturen umbilden. Wir werden solche Materialien mit adaptiver Elektronik ausstatten, um Systeme wie robotisierte Mikrokatheter, kleinste Roboterarme und formbare neuronale Implantate zu entwickeln, die einer digitalen Instruktion folgend semiautonom handeln.“
Dr. Daniil Karnaushenko, Gruppenleiter im Team von Schmidt, ergänzt: „Solche komplexen Mikroroboter werden eine Vielzahl einzelner Aktuatoren und Sensoren benötigen. Elektronische Komponenten in einer solchen Dichte effektiv unterbringen und nutzen zu können, stellt eine Herausforderung dar, weil mehr elektrische Verbindungen nötig sind, als Platz vorhanden ist. Gelöst wird dies durch komplexe elektronische Schaltungen, die zukünftig in die adaptive Mikroelektronik integriert werden, um die entsprechenden Instruktionen an die richtigen Komponenten durchstellen zu können.“
Die Arbeit könnte auch zum aufkommenden Gebiet der robotergestützten Chirurgie beitragen. Denn intelligente chirurgische Werkzeuge, die zuverlässige Rückmeldung über ihre Form und Position generieren, wären bei der Behandlung von empfindlichem Gewebe durchaus hilfreich.