Fahrzeuge können heute immer mehr Aufgaben selbst übernehmen: Der Tempomat hält automatisch den Abstand zum Vordermann, der Spurhalteassistent korrigiert die Spur, Notbremsungen werden eingeleitet, wenn der menschliche Fahrer unachtsam ist. Möglich machen das Kameras im Fahrgastraum und Radar-Sensoren im Kühlergrill.
Künftig jedoch soll das Auto noch mehr Aufgaben übernehmen. Doch muss dafür die Sensordichte drastisch zunehmen. Die Idee, den Kühlergrill mit Sensoren vollzupflastern, ist bei Autodesignern nicht sehr beliebt.
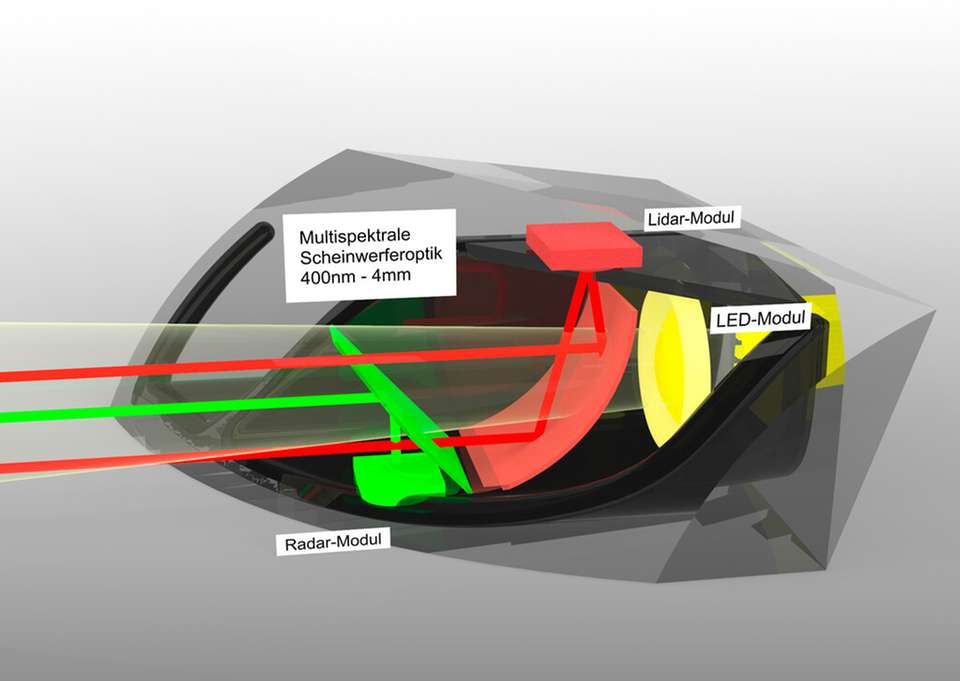
Radar- und LiDAR-Sensoren im Scheinwerfer integriert
Fünf Fraunhofer-Institute, darunter das Institut für Hochfrequenzphysik und Radartechnik FHR, haben sich im Projekt „Smart Headlight“ zusammengetan, um die Sensoren platzsparend und möglichst unauffällig einzubauen – ohne dass Funktion und Leistung beeinträchtigt werden.
Ziel des Projekts ist die Entwicklung eines sensorintegrierten Scheinwerfers für Fahrerassistenzsysteme, bei dem unterschiedliche sensorische Elemente mit adaptiven Lichtsystemen kombiniert werden. Auf diese Weise sollen Objekte auf der Straße, insbesondere andere Verkehrsteilnehmer wie Fußgänger, von den Sensoren noch besser erkannt werden. So kommt der LiDAR-Sensor etwa bei elektronischen Bremsassistenten oder bei Abstandsregelungssystemen zum Einsatz.
„Wir integrieren Radar- und LiDAR-Sensoren in die Scheinwerfer, die ja sowieso vorhanden sind und die ein Optimum an Transmission für optische Sensoren und Lichtquellen sowie für Verschmutzungsfreiheit garantieren“, sagt Tim Freialdenhoven, Wissenschaftler am Fraunhofer FHR. LiDAR-Sensoren (Light Detection And Ranging) arbeiten mit einem Messprinzip, das auf der Bestimmung der Zeit zwischen dem Aussenden eines Laserpulses und dem Empfangen des reflektierten Lichts beruht, und kann auf diese Weise Entfernungen sehr genau messen.
Zunächst gilt es, das LiDAR-System für die Integration in automobile Systeme auszulegen. Hinzu kommt: Das Licht, das aus dem Scheinwerfer auf die Straße fällt, soll von den beiden zusätzlichen Sensoren nicht beeinflusst werden – allerdings liegen die lichtspendenden LEDs ganz hinten im Scheinwerfer. Die Forschenden platzieren deshalb die LiDAR-Sensoren oben und die Radar-Sensoren unten im Scheinwerfergehäuse. Dennoch sollen die Strahlen beider Sensorsysteme den identischen Weg nehmen wie das LED-Licht. Dies wird zusätzlich dadurch erschwert, dass alle Strahlen unterschiedliche Wellenlängen haben: Das sichtbare Scheinwerferlicht liegt im Bereich von 400 bis 750 nm, die infraroten LiDAR-Strahlen mit 860 bis 1.550 nm recht nah am sichtbaren Bereich. Radarstrahlen haben dagegen eine Wellenlänge von 4 mm.
„Diese drei Wellenlängen sollen koaxial – also gleichachsig – zusammengeführt werden, wir sprechen daher von einem Multispektral-Combiner“, betont Freialdenhoven. Die koaxiale Strahlenführung ist wichtig, um einen Parallaxenfehler zu vermeiden, der erst noch kompliziert herausgerechnet werden muss. Darüber hinaus würde die Anordnung der Sensoren nebeneinander deutlich mehr Raum in Anspruch nehmen als die die koaxiale Anordnung.
Dieses Problem lösen die Forschenden über sogenannte Bi-Combiner: Dabei wird für die Kombination von LED-Licht und LiDAR-Licht ein speziell beschichteter dichroitischer Spiegel eingesetzt, mit dem beide Strahlenbündel über eine wellenlängenspezifische Reflexion auf eine Achse gebracht werden. Gleiches erfolgt, wenn auch wegen der sehr unterschiedlichen Wellenlängen ungleich komplexer, am zweiten Combiner, bei dem LED-Licht, LiDAR-Licht und Radar miteinander vereint werden. Da Radarsensoren im Automobilbereich bereits weit verbreitet sind, soll der Bi-Combiner so ausgelegt werden, dass die Hersteller vorhandene Sensoren ohne Anpassung weiterverwenden können.
Radar-Systeme durchdringen Nebel
Doch warum überhaupt die Kombination von optischen Systemen, LiDAR und Radar? „Jedes einzelne System hat seine Stärken, aber auch seine Schwächen“, erklärt Freialdenhoven. So kommen optische Systeme bei Nebel und Staub an ihre Grenzen, sprich bei optisch schlechten Sichtbedingungen. Radar-Systeme dagegen schauen nahezu ungehindert durch dichte Nebelschwaden.
Doch ist ihre Klassifikationsfähigkeit nicht sehr hoch: Radar kann zwar erkennen, ob es sich um einen Menschen oder um einen Baum handelt, doch es kommt nicht an die Klassifikationsfähigkeit vom LiDAR heran. „Wir arbeiten zudem daran, die Daten von Radar und LiDAR zu fusionieren – was insbesondere in puncto Zuverlässigkeit einen extremen Mehrwert bietet“, sagt Freialdenhoven. Ein Patent wurde bereits angemeldet, derzeit arbeitet das Team am Aufbau eines Prototyps.
Mit der Technologie werden die Möglichkeiten der Sensorintegration für Fahrerassistenzsysteme deutlich erweitert. Kleinere Lichtmodule, kompaktere LiDAR-Sensoren und integrierte Radarsensoren erlauben die Umsetzung von Multisensorkonzepten, insbesondere für das autonome Fahren bei steigenden Designanforderungen und begrenztem Bauraum. Auf diese Weise können autonome Systeme künftig nicht nur einen Menschen erkennen, sondern zudem seine Geschwindigkeit, seine Entfernung und den Winkel analysieren, in dem er zum Auto steht.