




Drei Stoßrichtungen stehen mit dem GreenBotAI im Vordergrund: Auch in Pandemiezeiten die Produktion künftig nicht mehr abreißen zu lassen, Europas Unabhängigkeit in der Produktionsautomatisierung zu stärken und den Energieverbrauch von Roboteranwendungen in europäischen Fabriken deutlich zu senken.
Roboter arbeiten ohne Zwischenstopp
Technisch setzt GreenBotAI bei den Reaktions- und Latenzzeiten von Industrierobotern, einer optimierten Bahnplanung sowie der Ausführung bestimmter Aufgaben noch während der Roboterbewegung („on-the-fly“) an.
Ohne Zwischenstopp ist dann beispielsweise die Aufnahme von 2D-Bildern zur Objekterkennung für die gewünschte Handlings- oder Montageaufgabe möglich. In dem deutsch-französischen Forschungsprojekt ist das Fraunhofer IWU Konsortialführer.
Für eine intelligente und anpassungsfähigere Robotik
Der Projektschwerpunkt liegt auf einem agilen Ansatz für den Umgang mit Materialien und Werkstücken. KI-Algorithmen sollen der Fertigung mehr Flexibilität verleihen und die Produktion in verschiedensten Industriebereichen beschleunigen. Ziel ist eine intelligente Robotik, die komplexe Aufgaben auch spontan erledigen kann.
Erforderliche Hardwarekomponenten, modernste Deep-Learning-Methoden zur Überwachung sowie Verbesserungen bei Datenverarbeitung und Fehlerkontrolle sollen einen Generationenwechsel in der Robotik einläuten.
Ohne Austausch von Robotern Energieverbrauch reduzieren
GreenBotAI arbeitet an mehreren Stellhebeln, um den Energieverbrauch in einer Größenordnung von bis zu 25 Prozent zu senken. Dazu zählen datenreduzierte KI-Modelle, beschleunigte Greifaufgaben und eine verringerte Rechenleistung.
Auf der Hannover Messe zeigen die Projektpartner, wie gut sie bereits vorangekommen sind. Ein mit industrieller Kameratechnik in 2D aufgenommenes Einzelbild („One-Shot-Demonstration“) des Bauteils und wenig Rechenleistung genügen, damit der Roboter dieses Bauteil aufnehmen, überprüfen und in die gewünschte Position bringen kann. Dabei übernimmt die am Fraunhofer entwickelte Software Xeidana die Kontrolle, ob das richtige Bauteil aufgenommen wurde.
Bewegungsabläufe mit simplen Bildinformationen steuern
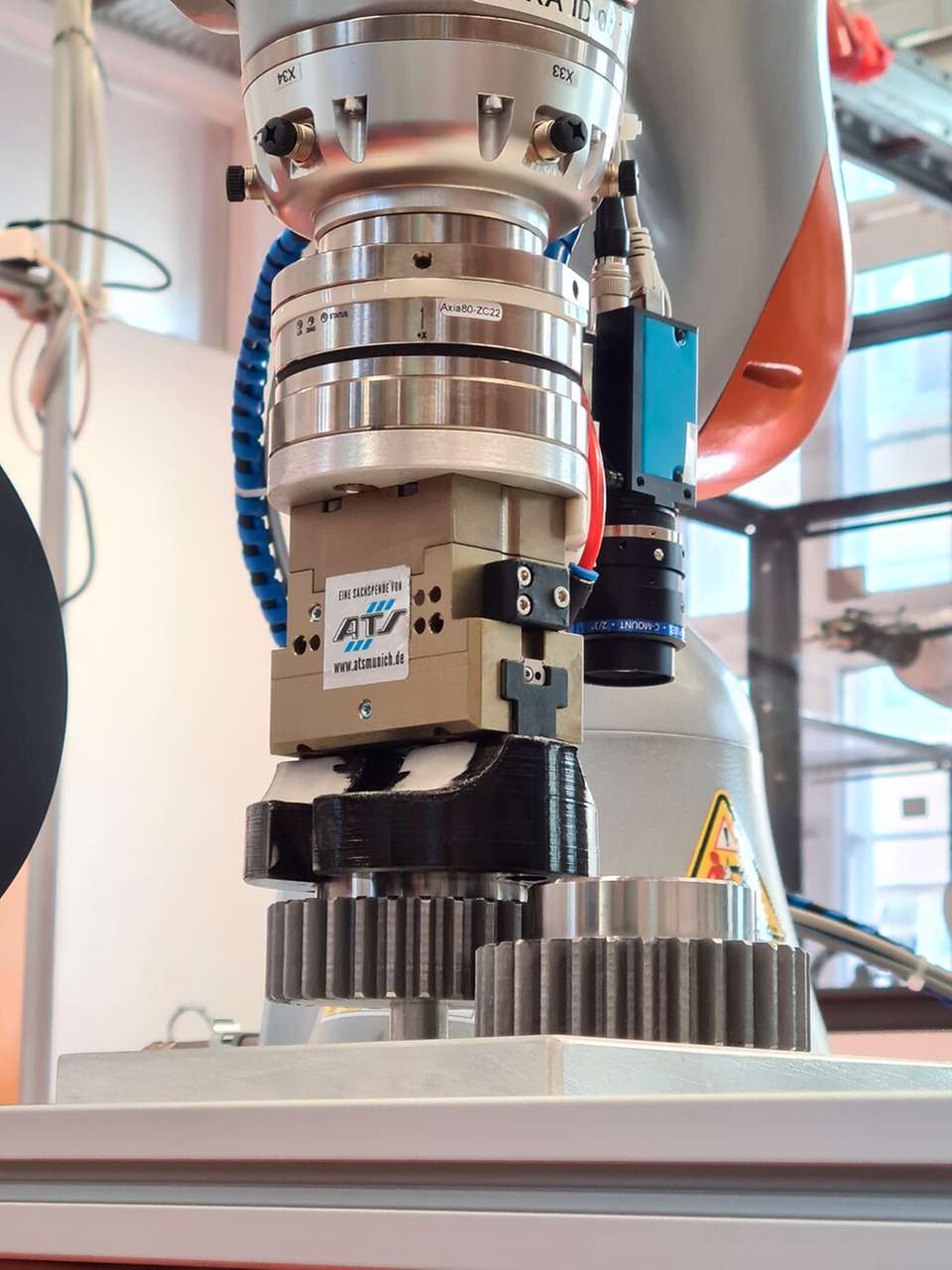
Gäste am Messestand dürfen es selbst ausprobieren: Sie legen dazu ein Zahnrad an beliebiger Stelle auf einem Tisch im Arbeitsraum eines kollaborativen (für die Zusammenarbeit mit Personen ausgelegten) Roboters ab.
Auf Basis der Bildinformation ermittelt die Software die Positionen aller Objekte relativ zum Roboter, berechnet die Roboterbahn und bestimmt die Griffposition. Der Roboter greift nun das Zahnrad, prüft es und verlässt sich dabei ganz auf die Bildinformationen. Hier kommt die echtzeitfähige Auswertung von Kraftdaten ins Spiel, die dem Roboter vorgibt, wie er das aufgenommene Zahnrad in ein zweites Zahnrad einpassen soll.
Smarte Anwendung mit dem GreenBotAI
Dies funktioniert mit einer smarten Anwendung von KI, die den Tastsinn des Menschen imitiert. Alle realen Aktionen des Roboters werden zusätzlich über einen Digitalen Zwilling visualisiert. Die Montage sowie die Anwendung zur integrierten Qualitätskontrolle können Besucherinnen und Besucher ebenfalls live erleben.
Projektpartner in GreenBotAI sind neben dem Fraunhofer IWU die Hochschule München (Fakultät für angewandte Naturwissenschaften und Mechatronik), der Softwareentwickler Inbolt sowie die École Nationale Supérieure d‘Arts et Métiers (ENSAM LISPEN). Fördermittelgeber auf der deutschen Seite ist das Bundesministerium für Wirtschaft und Klimaschutz.









.jpg "Mensch-Maschine-Interaktion und Robotik mit Virtual-Twin-Technologie")