


Künstliche Intelligenz (KI) und maschinelles Lernen (ML) werden eingesetzt, um die herkömmliche Steuerung durch fortschrittlichere Funktionen zu ergänzen. Entscheidend für viele dieser Architekturen ist die Nutzung verteilter Intelligenz und Steuerung. Das erfordert die Fähigkeit, große Datenmengen nicht nur schnell, sondern auch vorhersehbar zu bewegen.
Ein Trend bei der Entwicklung verteilter Intelligenz im Automotive-Bereich ist der zunehmende Einsatz zonaler Architekturen. Anstatt elektronische Steuergeräte (ECUs) bestimmten Funktionen zuzuweisen und sie über Ethernet oder einen traditionellen Feldbus wie CAN zu verbinden, konsolidieren die Fahrzeughersteller Anwendungen auf eine kleinere Anzahl von Hochleistungs-SoCs, die mehreren Anwendungen zugewiesen werden können. So kann ein Speicherknoten sowohl Instrumentendaten aus dem Betrieb und den Bewegungen des Fahrzeugs als auch Multimedia-Inhalte erfassen, die die Insassen während der Fahrt sehen oder hören möchten. Die gesamte Kommunikation wird über zonale Gateways abgewickelt, die hohe Sicherheit zwischen den verschiedenen Anwendungen sicherstellen. Somit erhalten Infotainment-Anwendungen keinen Zugriff auf die Steuerfunktionen des Motors, die Lenkung oder die Bremssysteme.
Eine ähnliche Architektur taucht in industriellen Systemen auf. Anstatt dass jede Werkzeugmaschine eine unabhängige Einheit bildet, die mit anderen über einen Feldbus mit geringer Bandbreite (zum Beispiel Profibus) kommuniziert, sind die Maschinen über Ethernet mit hoher Datenrate verbunden. Damit lassen sich Video- und andere umfangreiche Sensordaten zur Verarbeitung an Edge-Computer senden. KI-Anwendungen, die auf diesen Edge-Rechnern laufen, können schnell feststellen, ob die Werkzeugmaschinen korrekt arbeiten oder ob Anpassungen vorgenommen werden müssen, um Temperatur- oder andere Änderungen der Bedingungen auszugleichen.
Die Herausforderung bei solchen zonalen Architekturen besteht in der Sicherstellung, dass diese verteilten Implementierungen die erforderliche Echtzeitleistung erreichen. In der Automatisierungstechnik sind Regelkreise stets so konzipiert, dass sie Aktualisierungen von Sensoren mit einer konstanten Rate erwarten. Sie können Instabilitäten entwickeln und wichtige Positionierungsgenauigkeit verlieren, wenn sich die Aktualisierungen und Sensormesswerte, die die Steuerungsalgorithmen erwarten, über das Verarbeitungsfenster hinaus verzögern. Die Maschine ist dann gezwungen, Daten zu verwenden, die wahrscheinlich nicht mehr aktuell sind und die physikalische Realität nicht mehr widerspiegeln. Unvorhersehbare Latenzzeiten wirken sich auch auf die Benutzererfahrung in der Fahrzeugumgebung aus. Datenströme können sich gegenseitig stören, so dass die Insassen des Fahrzeugs einen Stillstand der Videoübertragung erleben. Der Gesamteindruck ist dann der eines Systems, das nicht mithalten kann.
Die Lösung
Eine Lösung besteht in der Vergrößerung des Spielraums, indem man zu schnelleren Formen von Ethernet übergeht. Dieser Lösungsansatz reicht aber meist nicht aus. Das Problem liegt im Best-Effort-Prinzip des grundlegenden Ethernet-Standards: Jeder Teilnehmer (Peer) mit einem sendebereiten Datenpaket kann auf das Netz zugreifen und andere Aktivitäten in diesem Netzsegment blockieren, bis er fertig ist. Dieser architektonische Ansatz reicht zurück in das Design vieler herkömmlicher Ethernet-Controller. Sie verfügen über einfache Puffer für die Warteschlange zu bearbeitender Pakete, die nicht zwischen verschiedenen Datenarten unterscheiden. Ein Befehl mit hoher Priorität, der in ein kurzes Paket eingekapselt ist, kann leicht dazu gezwungen werden, ein oder mehrere Videobilder lang abzuwarten, bevor er im Netzwerk übertragen wird. Dieses Verhalten wurde von Toshiba in einer Referenzplattform untersucht. Diese zeigt, wie Anwendungen in Automotive- und Industriesystemen durch die Unvorhersehbarkeit im Netz beeinträchtigt werden.
In der von Toshiba geschaffenen Testumgebung sind Hochgeschwindigkeits-Ethernet-Controller, die sowohl 1- als auch 10-Gbit/s-Netzwerkschnittstellen unterstützen, jeweils mit einem Host-SoC verbunden. Auf diesem System läuft der Anwendungscode, der das Verhalten verschiedener erwarteter Anwendungsfälle im Automotivebereich simuliert. Ein ähnliches Referenzdesign diente auch zur Demonstration der begrenzten Latenz und des geringen Jitters bei Ethernet mit sehr hoher Bandbreite in verschiedenen industriellen Automatisierungsumgebungen.
Die Tests des Unternehmens an diesen Referenzdesigns haben gezeigt, wie der konventionelle IEEE-802.1-Ethernet-Protokollsatz dazu führen kann, dass ein gewisser Prozentsatz der Datenpakete, die vorhersagbar zugestellt werden müssen, stark verzögert wird. Das kann schwerwiegende Auswirkungen auf Echtzeitanwendungen haben, wie in vielen Fällen, in denen der Datenverkehr mit sehr geringer Priorität relativ wenig Bandbreite verbraucht, nämlich weniger als 1 Mbit/s in einem 100-Mbit/s- beziehungsweise 1-Gbit/s-Netz.
Hier wurde die Pfadverzögerung des Verkehrs mit hoher Priorität, zum Beispiel für die Übertragung von Motorsteuerungsbefehlen, im Experiment mit bis zu 60 µs gemessen. Dabei wurden die Pakete über drei Sprünge/Hops durch zwei Switches vom Sender zum Empfänger übertragen. Bei größeren Mengen an Hintergrundverkehr mit niedriger Priorität, der eine Bandbreite von bis zu 840 Mbit/s beanspruchte, stieg die maximale Pfadverzögerung um mehr als das Siebenfache auf fast 440 µs.
Die Verteilung der Pfadverzögerungen wurde unter diesen Bedingungen stark bimodal, wobei viele Pakete Verzögerungen von mehr als 300 µs aufwiesen, obwohl ein großer Teil ihr Ziel in weniger als 60 µs erreichte. Tests zeigen die Auswirkungen dieser Verzögerungen in einem industriellen Umfeld und kamen zu dem Ergebnis dass eine reibungslose Bewegung und das Erreichen programmierter Zielpositionen nicht möglich waren. So wurden in den Tests Pakete, die nach einer programmierten Frist eintrafen, verworfen, anstatt dazu verwendet zu werden, potenziell falsche Daten an einen Regelkreis zu liefern.
Was gibt es noch?
Die TSN-Erweiterung (Time Sensitive Networking) des Ethernet-Standards bieten OEMs und Integratoren die Möglichkeit, das Hochgeschwindigkeitsnetzwerk für Echtzeit- und Streaming-Media-Anwendungen zu nutzen. Zu diesen Standards gehören IEEE 802.1AS, das generalized Precision Time Protocol (gPTP), das das Timing- und Synchronisationsverhalten für Ethernet in TSN-Umgebungen definiert, und der IEEE-802.1Qbv-Standard, der Erweiterungen vorsieht, die das Senden von Datenverkehr nach einem strengen Zeitplan ermöglichen.
gPTP ermöglicht den Endgeräten in einem Ethernet-Netzwerk, sich auf eine gemeinsame lokale Zeit mit einer Genauigkeit im Sub-µs-Bereich zu einigen. Dabei lassen sich Pfadverzögerungen über das Netzwerk berücksichtigen, das sie miteinander verbindet. Mit einer gemeinsamen Zeitreferenz ermöglicht gPTP zeitgesteuertes Shaping und Paket-Scheduling. So wird sichergestellt, dass hochkritische Datenpakete innerhalb eines bekannten Zeitrahmens zugestellt werden.
Der zeitbewusste IEEE-802.1Qbv-Scheduler unterteilt die Übertragungsfenster in einen Zyklus fester Länge. Innerhalb jedes Zyklus können verschiedene Zeitabschnitte einer oder mehreren der acht IEEE 802.1Q-Prioritätsstufen zugewiesen werden. Den diesen Stufen zugewiesenen Paketen wird dann die exklusive Nutzung des Netzwerks für die Dauer dieses Zeitfensters gewährt.
Testumgebung im Detail
Das Unternehmen hat seine Testumgebungen um Ethernet-Controller herum aufgebaut, die gPTP- und IEEE-802.1Qbv-Funktionen bieten. Damit lassen sich die Auswirkungen dieser Technik auf repräsentative Softwareaufgaben im Automotive- und Industriebereich untersuchen. Während die Pfadverzögerung in einem ausschließlich auf Legacy-Protokollen basierenden Setup zwischen 50 und 430 µs schwankte, reduziert sich die Verteilung zeitkritischer Pakete, die gPTP und IEEE 802.1Qbv nutzen, auf eine viel schmalere Normalverteilung um die 25,5 µs und einen Jitter von nur 0,3 µs. Dies ermöglichte eine reibungslose Steuerung aller Achsen der Werkzeugmaschine, ohne dass Positionierungsziele verfehlt wurden.
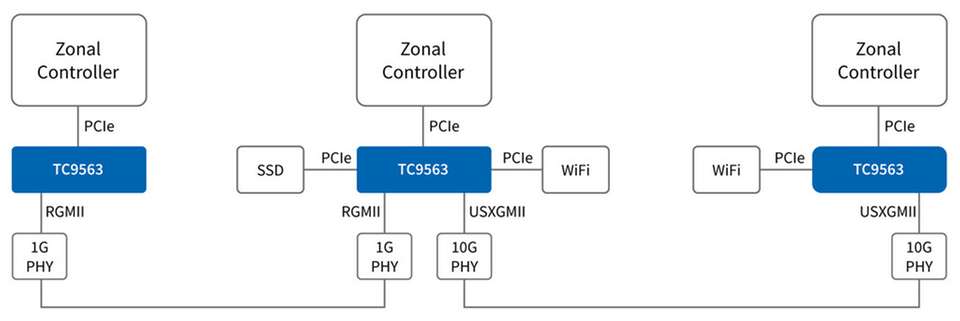
Mit ihrer Unterstützung von gPTP, IEEE 802.1Qav, IEEE 802.1Qbv und anderen wichtigen Echtzeitaspekten sind der TC9562 und TC9563 optimale Bestandteile für zuverlässige Automotive- und Industriesteuerungssysteme. Der TC9562 unterstützt 1-Gbit/s-Ethernet, und der TC9563 erweitert die Netzwerkfähigkeit auf zwei Ports, die beide Datenraten bis 10 Gbit/s unterstützen. Zusätzlich zu den Hochgeschwindigkeits-Ethernet-Fähigkeiten enthalten beide Bausteine Funktionen, die die Kommunikation zu und von Host-Multicore-SoCs durch PCIe-Schnittstellen optimieren. Im Falle des TC9563 mit Gen3-Funktionen und integrierter Single-Route-I/O-Virtualisierung (SR IOV), mit der sich die Leistungsfähigkeit der Software verbessert, die unter einem Hypervisor ausgeführt wird.
Fazit
Sowohl im Automotive- als auch im Automatisierungsbereich wird die Kombination aus Echtzeit-Fähigkeit und Kommunikation mit hoher Bandbreite zu einer wesentlichen Anforderung. Die Integration von TSN-Erweiterungen für Ethernet in Bausteinen wie dem TC9562 und TC9563 von Toshiba stellt sicher, dass OEMs und Systemintegratoren auch über die notwendigen Voraussetzungen verfügen, Echtzeit-Netzwerke mit hoher Bandbreite in modernen Fahrzeugen und Fabriksystemen umzusetzen.