


3D-Drucker sind längst nicht mehr nur der Industrie vorbehalten. Auch zu Hause drucken die Wundermaschinen inzwischen aus, was die Fantasie begehrt, ob Elektronikgehäuse oder Motorradzubehör. Hobbybastler können Stunden damit verbringen, den Druckergebnissen beim Wachsen zuzusehen. Sehr zeitaufwändig ist es, den 3D-Drucker für den Heimgebrauch so zu konfigurieren, dass zufällige Druckerfehler, wie etwa ein störender Tropfen des ausgehärteten Filaments, nicht mehr auftreten.
Noch wichtiger ist das Vermeiden solcher Abweichungen dort, wo die Anforderungen an den 3D-Druck wesentlich strenger sind als daheim. In der Veterinärmedizin kommen 3D-Drucker mittlerweile zum Beispiel bei chirurgischen Anwendungen zum Einsatz. Hier dürfen die Druckerzeugnisse keine Ungenauigkeiten aufweisen. Durch Verbesserungen am Gerät ist es möglich, diese zu minimieren.
Bausatz selbst aufpeppen
Wer die Kosten für einen gebrauchsfertigen Drucker mit hoher Genauigkeit scheut, ist mit einem Bausatz gut bedient, etwa mit dem Prusa i3 MK2. Der Drucker entstand im Open-Source-
Projekt RepRap. Das Projekt bietet allen Interessierten, die mehr über 3D-Druck lernen möchten, eine Fülle an Informationen. Als Ergänzung eignen sich YouTube-Videos, wie sie beispielsweise Thomas Sanladerer anbietet. Sanladerer teilt die Probleme bei 3D-Druckern in verschiedene Gruppen ein. Zum Beispiel bringt bereits der Aufbau eines solchen Druckers viele Probleme mit sich: Egal ob Delta-Drucker oder X-Y-System, jedes Gerät hat seine eigenen Schwachstellen.
Den Druckkopf rechtwinklig in X-, Y- und Z-Richtung bewegen zu können ist notwendig für korrekte Ausdrucke. Das Portal muss also genau rechtwinklig sein. Das Auswinkeln ist jedoch umständlich: Veränderungen an einer Stelle können Auswirkungen auf eine andere haben.
Ein weiteres Problemfeld ist die Ebenheit des Druckbetts. Ist das Druckbett nicht eben und nicht winklig mit dem Portal, beeinträchtigt dies den Ausdruck.
Mechanische Fehler stellen eine weitere Quelle von Druckproblemen dar. Dazu gehören der Nachlauf eines Riemens, Führungen oder Gewindestangen. Sie können selbst dann auftreten, wenn der Drucker perfekt ausgewinkelt und eben ist.
Material als Fehlerquelle
Beim Prusa i3 MK2 ist die Z-Achse durch normale Gewindestangen realisiert. Jede Stange ist mit einem eigenen Schrittmotor auf der einen und Muttern auf der anderen Seite verbunden. Diese Muttern befinden sich an der Unterseite der X-Achsen-Halterung, an der die Hubkraft des X-Schlitten auftritt. Voraussetzung dafür ist, dass das Gewicht der Halter, des X-Achsen-Schlitten und des Druckkopfes ausreichend sind, um den Kontakt der Halter mit den Schrauben sicherzustellen. Dieser Aufbau hat den Vorteil, dass der Druckkopf nicht mit Kraft in das Druckbett gefahren werden kann. Ein Fehler, der öfter während der Kalibrierung oder durch einen falschen Bewegungsbefehl zur Positionierung der Z-Achse auftritt und dazu führt, dass sich die Muttern aus ihren Halterungen lösen.
Auch aus anderen Gründen entsteht manchmal auf einer Seite des Druckers ein Spalt zwischen der Mutter und der Halterung. Das geschieht beispielsweise, wenn einer der Z-Achsen-Schrittmotoren Schritte verliert. Zwar lässt sich die Schraube händisch zurückdrehen, die Folge ist jedoch ein Winkelfehler, der nur durch aufwändiges Auswinkeln behoben werden kann. Ein weiteres mechanisches Problem ist eine fehlerhafte Gurtspannung.
Beobachten erleichtert Verbesserungen
Zu schnelles Drucken, eine falsche Temperatur beim Druck oder die fehlerhafte Einstellung der Software sind weitere Fehlerquellen. Bei der Open-Source-Software, die Open-Source-
Drucker steuert, besteht zum Beispiel ein Verhältnis von 1:N zwischen Software und Drucker. Deshalb müssen genaue Einstellungen getroffen werden, um die Software optimal abzustimmen. Wieviel Filament mit einem Motorschritt ausgegeben wird, erfordert etwa eine genaue Beobachtung.
Neben dem Aufbau und mechanischen Fehlern sollten auch der Druckprozess und das zum Druck verwendete Material beachtet werden. Es ist beispielsweise hilfreich zu wissen, dass PLA (Polystyrene Latex Aerosol) fast genauso stark sein kann wie ABS (Acrylonitrile Butadiene Styrene), wenn das gedruckte Objekt anschließend in einem richtig eingestellten Ofen für die passende Zeit aushärtet. Mit der Zeit gesammelte Erfahrungen können hier Verbesserungen bringen.
Die Motorleistung von 3D-Druckern lässt sich mit Hilfe von Elektronik anpassen. Die günstigste Variante sind Schrittmotoren, die allerdings laut und ineffizient sind, kein Feedback bieten und ruckeln. Zudem beanspruchen sie die Mechanik stark, da sie Veränderungen in der Beschleunigung und damit schraubenlösende Vibrationen hervorrufen. Wie von Software gibt es auch von der Elektronik von 3D-Druckern Open-Source-Varianten.
Zwei Varianten für Mikroschrittmacher
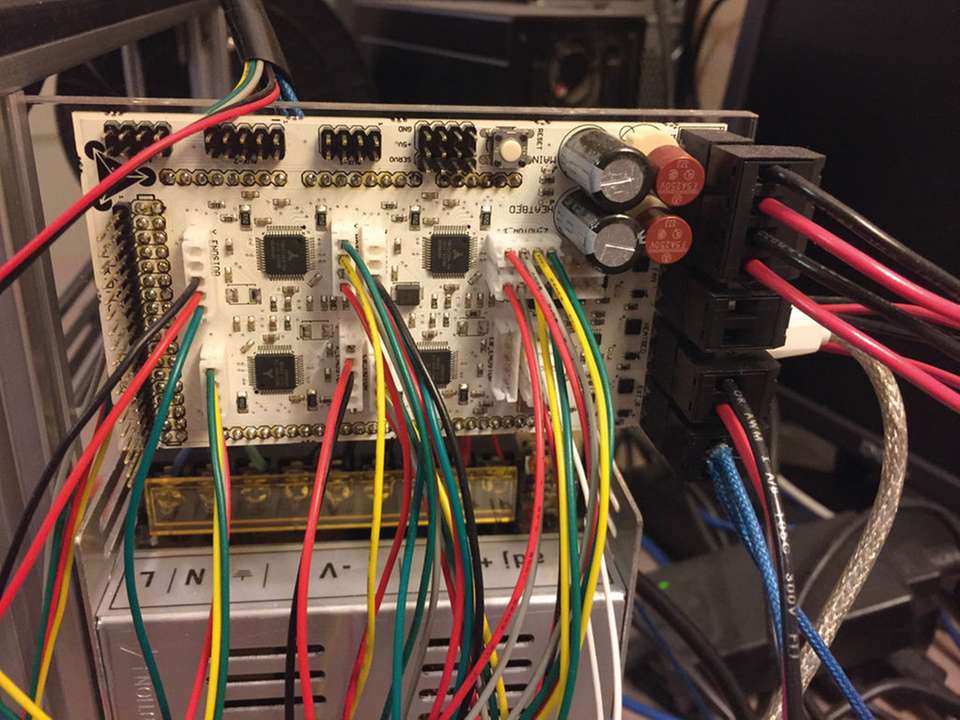
Das bekannteste Elektronik-Modul für den 3D-Druck ist ein Arduino-Board mit einem Ramps-Shield. Das Shield beinhaltet die Schrittmotortreiber. Im Halbschritt macht ein Standardschrittmotor 200 Schritte für eine 360-Grad-Motordrehung, also 1,8 Grad pro Schritt. Das Ramps-Board unterstützt Mikroschritte: Der Strom wird durch die Motorspulen proportional phasenversetzt gesteuert, wodurch der Rotor des Motors in jedem gewünschten Mikroschritt positioniert werden kann. Durch das Ramps-Shield lässt sich jeder Vollschritt in 16 Mikroschritte unterteilen, was für eine deutlich feinere Auflösung als 1,8 Grad pro Schritt sorgt.
Unglücklicherweise hängt diese erhöhte Auflösung von der Last ab. Es muss die exakte Position bestimmt werden, die vom Treiber angesteuert wurde. Allerdings gibt es kein Feedback auf dem Ramps-Board, mit dem die Ausführung der Ansteuerung sicher erfasst werden kann. Eine Belastung, die mehr Kraft benötigt, als der Motor durch die Mikroschritte aufbringen kann, kann zu Schrittverlust und Fehlausrichtung führen und die Z-Achse wie oben beschrieben beeinträchtigen.
Abhilfe schafft das Schrittmotor-
Treiber-Board TRAMS für den Arduino. Es verfügt über die Schrittmotortreiber TMC5130. Das Board und die ICs ermöglichen 256 Mikroschritte und unterstützen ein sensorloses Feedback namens StallGuard2. Dieses erkennt ein Stocken des Motors und kann den Motorstrom oder die Geschwindigkeit erhöhen. Der Motor bleibt damit synchron mit dem Controller und es ergibt sich eine geschlossene Feedback-Schleife.
Der TMC5130 erkennt und korrigiert nicht nur das Stocken, sondern unterstützt auch einen nahezu lautlosen Betrieb. Außerdem reduziert er den Motorstrom auf die benötigte Menge. Da die Motoren während des Betriebs nicht überlastet werden, benötigen sie keine Kühlkörper. Ein weiterer Vorteil ist eine gleichmäßigere Bewegung dank dem sensorlosen Feedback des Motors, das Ruckeln reduziert und Vibrationen verhindert.