





Der Robotereinsatz, ergänzt durch bildverarbeitende Systeme, wird in der Fertigungsindustrie hauptsächlich von der Anforderung nach flexibler Montage und Materialhandhabung getrieben. Mittlerweile nutzen auch kleine bis mittlere Hersteller die Möglichkeiten von Robotern zu Wettbewerbsvorteilen. Industrieroboter helfen die Kapitalrendite zu steigern, erhöhen die Produktivität durch optimale Ausnutzung von Platz und Zeit, stellen gleichbleibende Qualität sicher, garantieren Präzision, erhöhen die Sicherheit und maximieren die Effizienz. Aus diesen und weiteren Gründen ist der Einsatz von Industrierobotern weit verbreitet. Deren Aussehen variiert in Gestalt, Größe und Form.
Programmierbare Industrieroboter haben den Vorteil höherer Flexibilität gegenüber Nicht-Roboter-Lösungen wie CNC-Maschinen oder anderen spezifischen Automationsgeräten. Da sie problemlos für verschiedene Anwendungen umfunktioniert werden können oder gleich multifunktional sind, sind sie sehr kosteneffizient. Umfunktionieren bedeutet aber oft, dass Roboter umprogrammiert werden müssen, um neuen Anforderungen gerecht zu werden. Herkömmliche Methoden rufen dazu den Roboter-Controller auf, um in dessen nativer Umgebung die Befehlssequenzen zu programmieren, um dann mit dem Vision-System zu kommunizieren. Dieses läuft aber in einer komplett anderen Softwareumgebung. Die Schwierigkeit bei dieser Herangehensweise ist, dass es Zeit und die gemeinsame Anstrengung von vielen Seiten braucht, um diese Kommunikation verschiedener unabhängiger Systeme zu etablieren. Unterschiedliche Programmierkenntnisse und ein gutes Verständnis der beiden Umgebungen sind vonnöten. Es ist dabei auch sehr wichtig, dass die Kontrolle beim Roboter-Controller verbleibt.
Neue Client-Server-basierte Software-Entwicklungsprodukte ermöglichen den Programmierern durch die Unterstützung verschiedener Roboterprotokolle, sowohl Code für den Roboter-Controller als auch für das Vision-System innerhalb einer einzelnen Umgebung zu entwickeln. Diese vereinheitlichte Oberfläche macht die Entwicklung von Anwendungen zur Vision-basierten Roboterführung einfacher und schneller. Dank diesem intuitiven und einfach zu bedienenden Ansatz ist die Programmierung der Roboter zugänglicher und erfordert keine klassischen Programmierexperten mit Wissen über proprietäre Entwicklungsumgebungen und Sprachen. Matrox Imagings kürzlich vorgestellte Unterstützung des Denso-binary-access-protocol-Roboter-Interfaces (b-CAP) innerhalb des Design-Assistenten ist ein solches Beispiel. Damit ebnet die Design-Assistant-Entwicklungsumgebung den Weg, Vision-basierte Anwendung von Denso-Robotern zu implementieren, ohne direkt den entsprechenden Controller programmieren zu müssen.
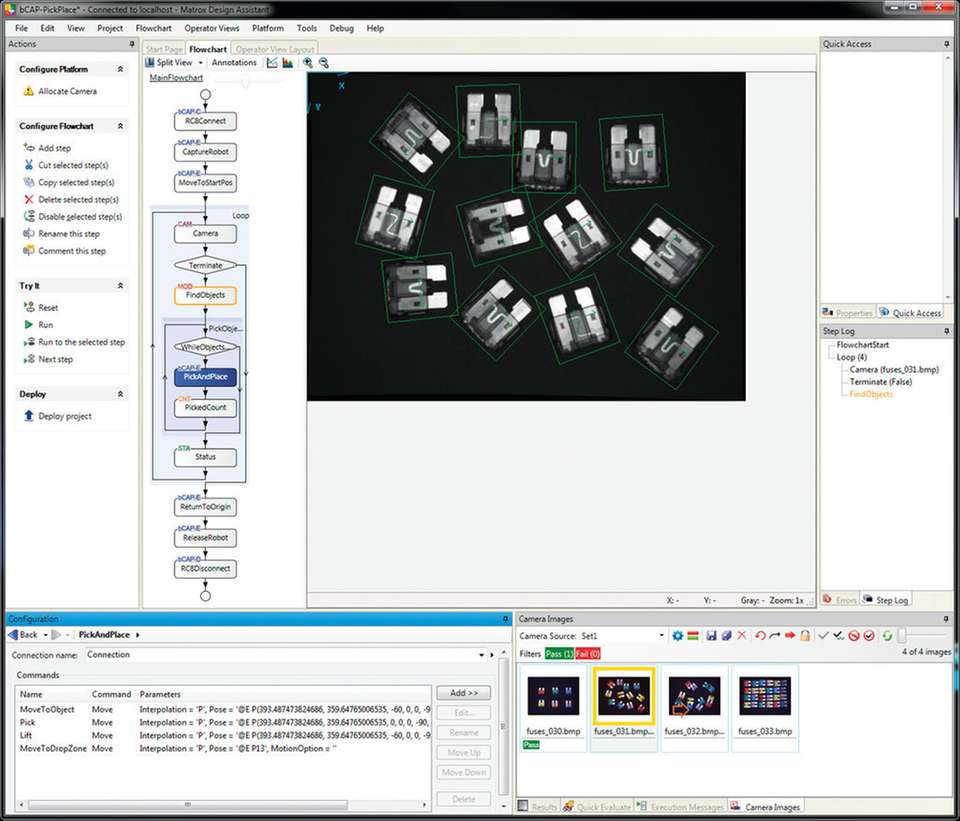
Der Matrox-Design-Assistant-4 ist die erste hardwareunabhängige integrierte Entwicklungsumgebung (IDE), die dem Anwender auf einfache Art erlaubt, Flussdiagramm und HMI-Interface zu erstellen und so Projekte in Rekordzeit vom Konzept zur Anwendung zu bringen, ohne dabei klassisch programmieren zu müssen. Die flexible Projekt-Verteilung beinhaltet als Zielplattform Matrox-Iris-GT-Smart-Kameras, Matrox-4Sight-GPm-Industrie-Computer und PCs mit Standard GigE-Vision- oder USB3-Vision-Kameras. Design-Assistant ist eine IDE, in der Vision-Anwendungen durch Erstellen eines intuitiven Flussdiagramms anstelle klassischen Programmcodes erzeugt werden. Zusätzlich zum Flussdiagramm kann der Anwender in der IDE eine grafische Benutzerschnittstelle für die Anwendung erstellen.
„Die Matrox-Imaging-Implementierung unseres b-CAP-Interfaces in Design-Assistant bedeutet, dass die ganze Logik des Vision-Sub-Systems sowie der Roboter selbst in einer einzigen Entwicklungsumgebung abgebildet ist“, sagt Yousuke Sawada, Manager der Controller Business Unit bei Denso Wave. „Integratoren werden die signifikante Reduktion bei Kosten und Entwicklungszeit zu schätzen wissen.“ Die b-CAP-Unterstützung im Design-Assistant ist als Satz an Client Steps implementiert, die sich zum Beispiel mit einem RC8-Controller verbinden, dann die Abarbeitung anfordern (wie beispielsweise das Aufnehmen und Platzieren von Teilen) und sich nach Beendigung der Aufgabe vom Server, der auf dem Denso-Roboter-Kontroller läuft, wieder trennen. Diese Steps sind auf das Denso-Roboter-b-CAP-Protokoll zugeschnitten. Zusätzliche Software außer dem Matrox-Design-Assistant selbst, ist für das Vision-System nicht nötig. Jedes Gerät wie Computer, PLC oder sogar ein Tablet kann programmiert werden, um den Roboter zu steuern.
„Die Nachfrage nach Robotern ist weiter steigend, da Firmen einen hohen Bedarf an den Vorteilen haben, die Automatisierung bietet. Denso-Roboter sind in der verarbeitenden Industrie auf der ganzen Welt weit verbreitet“, sagt Sam Lopez, Direktor Vertrieb und Marketing bei Matrox-Imaging. „Mit unserer Unterstützung des Denso-b-CAP-Interfaces im Design-Assistant sind unsere gemeinsamen Kunden in der Lage, Denso-Roboter schneller und kosten-effektiver mit
Vision-basierter Robotersteuerung zu versehen.“







.jpg "Mit Robotik läufts im Mittelstand")

