Als einheitliche Schnittstelle für elektrische Antriebe ermöglicht SMI die Übermittlung von Datentelegrammen von der Steuerung zum Antrieb und zurück. Mit SMI-Antrieben lassen sich deshalb eine exakte Positionierung aller Behänge, ein nahezu geräuschloser Anfahr- und Stoppbetrieb sowie eine einfache Verdrahtung realisieren. Auch die Steuerungsrückmeldung der Motoren an die Gebäudeautomation überzeugt immer mehr Anwender.
Funktionsweise von SMI-Antrieben
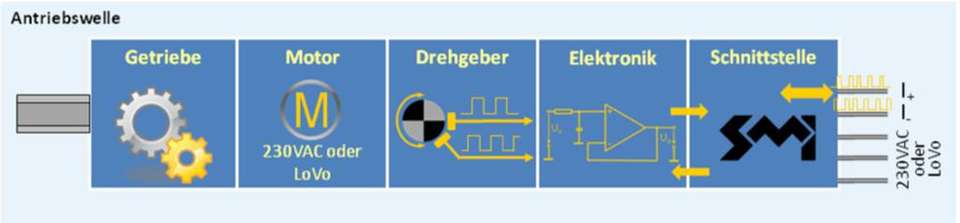
Um SMI-Antriebe verstehen zu können, ist es nötig, deren Funktionen zu kennen. Im Vergleich zu herkömmlichen Antrieben handelt es sich hierbei nicht mehr nur um Motoren, die zwei Drehrichtungen und einen Stopp beherrschen, sondern um hochwertige Antriebe mit integrierter Elektronik. Diese beinhalten einen SMI-Busanschluss.
Der Elektromotor kann dabei als 230-V-Wechselstrom-(AC)-Antrieb (SMI-230-V) oder auch als Gleichstrom-(DC)-Antrieb (SMI LoVo), zum Beispiel für 24 VDC, ausgeführt sein. Ein Getriebe erhöht das Drehmoment auf die für den Behang erforderlichen Werte und reduziert die hohe Motordrehzahl auf die bei Sonnenschutzanlagen üblichen Drehzahlen von einigen zehn Umdrehungen pro Minute.
Exaktere Positionierung mit integriertem Drehgeber
Das Herz von SMI-Antrieben sind der integrierte Drehgeber und die Steuerelektronik. Der auf der Motorwelle montierte Drehgeber liefert elektrische Impulse in hoher Auflösung. Diese werden von der integrierten Steuerelektronik für die exakte Positionierung des Antriebs ausgewertet.
Bei Antrieben mit mechanischen Endschaltersystemen erfolgt die Positionierung über eine Zeitansteuerung außerhalb des Antriebs, beispielsweise in einem KNX-Jalousieaktor, ohne echtes Feedback der tatsächlichen Motorbewegung. Hier ist es meist notwendig, Lamellenverstell- und Gesamtfahrzeiten per Stoppuhr zu ermitteln und bei der Inbetriebnahme einzugeben. Dieses Vorgehen führt unter Umständen zu deutlichen Toleranzen bei der Positionierung.
Dahingegen wird durch das Zählen der Impulse des Drehgebers eine wesentlich genauere Positionierung ohne erkennbare Toleranzen erreicht. Die Signale des Drehgebers können je nach Motorart (DC oder AC) auch für die Drehzahlregelung verwendet werden, wodurch eine lastunabhängige, konstante Fahrbewegung der Behänge sowie ein sanfter, geräuscharmer An- und Auslauf erreicht wird.
Bidirektionale Kommunikation
Die Steuerelektronik übernimmt zudem die Kommunikation mit der Sonnenschutzsteuerung über die standardisierte SMI-Schnittstelle. Über eine zweiadrige Datenleitung wird mit dem Antrieb bidirektional kommuniziert. Dies bedeutet, dass sowohl Befehle an den Antrieb gesendet, als auch Werte wie aktuelle Endlage oder Zustandsmeldungen aus dem Antrieb ausgelesen werden.
Insbesondere das Auslesen der Daten, wie beispielsweise Leistungsaufnahme, Anzahl der Fahrten und aufgetretene Fehler, wird im Rahmen eines effektiven Gebäudebetriebs immer wichtiger. Zudem sorgt die exakte Positionierung, welche beispielsweise für eine Schattenkantennachführung notwendig ist, für hohe Akzeptanz beim Nutzer und dient gleichzeitig der energetischen Verbesserung von Gebäuden.
Parallelschaltung reduziert Installationsaufwand
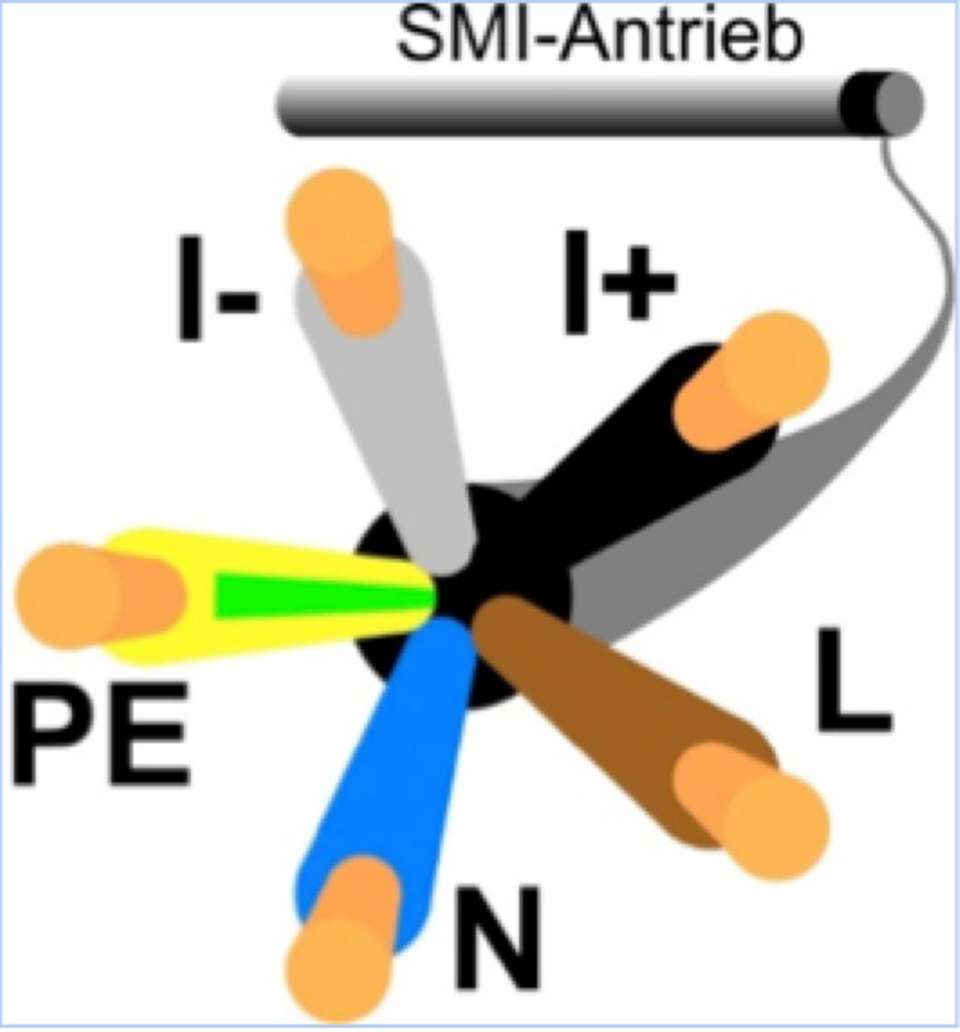
Ein wesentlicher Vorteil der SMI-Antriebe ist deren elektrischer Anschluss. Sowohl die Versorgungsleitungen für den Elektromotor als auch die zweiadrige Datenleitung werden in einem Kabel geführt – bei 230-V-Antrieben als fünfadriges und bei LoVo-Antrieben als vieradriges Kabel. Da die SMI-Schnittstelle ein paralleles Bussystem ist, werden alle Busteilnehmer, ergo SMI-Antriebe, parallelgeschaltet. Damit lässt sich der Installationsaufwand erheblich reduzieren.
Bei SMI-230-V sind die Datenleitungen I+/I- genau so zu behandeln wie 230-V-Leitungen, sodass Standard-Installationsleitungen verwendet werden können. Für Testzwecke können auch I+ beziehungsweise I- auf 230 V gelegt werden. Bei SMI LoVo handelt es sich hingegen um ein SELV-System. Die Leitungsauswahl und -führung hat hier entsprechend zu erfolgen.
In Rollos und Jalousien Platz finden
SMI-Antriebe sind als Rohrmotoren für den Einsatz in Markisen, Markisoletten oder Rollläden wie auch als Jalousieantriebe für den Einsatz in Jalousien beziehungsweise Raffstoren verfügbar. SMI-LoVo-Antriebe zeichnen sich durch kleine Bauformen aus, was sie für die Verwendung in innenliegenden Sonnenschutzanlagen wie Rollos oder Jalousetten prädestiniert. Mittlerweile stehen rund 30 verschiedene SMI-Antriebe in den unterschiedlichsten Ausführungen zur Verfügung, sodass für jede Anwendung der richtige Antrieb eingesetzt werden kann.
Darüber hinaus beschränkt sich der Einsatz von SMI-Antrieben nicht nur auf den Sonnenschutzbereich. Auch in der Fensterautomation hat SMI Einzug gehalten. Zur Ankopplung des SMI und SMI LoVo an die marktüblichen Gebäudeautomationssysteme stehen von verschiedenen Herstellern entsprechende Gateways zur Verfügung.
Den Fachartikel finden Sie im Original unter folgendem Link: