Für die Qualitätssicherung ist die Schnüffellecksuche in vielen Fertigungsprozessen unverzichtbar. Oft dient sie dazu, festzustellen, ob die Verbindungsstellen zwischen verschiedenen, bereits zusammengebauten Komponenten wirklich dicht sind. Im Automobilbau ist das etwa erforderlich, um vormontierte Baugruppen der Klimaanlage vor dem Fahrzeugeinbau zu prüfen oder wenn die Dichtheit des Gehäuses einer Traktionsbatterie nach außen – etwa gemäß IP67 oder IP69K – geprüft werden muss.
Damit die Traktionsbatterie ihre Kapazität lange behält, brauchen ihre Komponenten außerdem eine dauerhafte Kühlung. Wenn hier eine Dichtheitsprüfung zu zuverlässigen und reproduzierbaren Ergebnissen führen soll, bietet sich dafür eine automatisierte Schnüffellecksuche an: Die Schnüffel-Messsonde befindet sich dabei an einem Roboterarm. Aus Sicherheitsgründen muss die Messsonde allerdings einen gewissen Abstand zum Prüfteil einhalten. Daraus, und aus der Vorschubgeschwindigkeit der Sonde, ergeben sich hohe Anforderungen an die technischen Parameter des eingesetzten Prüfgeräts – genauer gesagt: an seinen Gasfluss.
Dynamisches Roboterschnüffeln
Bei einer automatisierten statischen Lecksuche soll eine einzige Stelle an einem Bauteil oder einer Verbindung auf Dichtheit geprüft werden. Bei einer dynamischen Schnüffellecksuche ist die Schnüffelsonde dagegen stetig in Bewegung, um einen größeren Bereich des Prüfteils zuverlässig auf Leckstellen zu untersuchen; zugleich soll dies mit möglichst hoher Geschwindigkeit geschehen. Es ist allerdings schwierig, beides gleichzeitig zu realisieren. Denn die Schnüffelsonde braucht zwingend einen gewissen Abstand zur Oberfläche des Prüfteils. Bei einer manuellen dynamischen Lecksuche kann der Bediener etwaige Bauteiltoleranzen noch ausgleichen – bei einer automatisierten dynamischen Schnüffellecksuche muss der Roboter dagegen zwingend einen Sicherheitsabstand einhalten. Zudem reduziert sich mit steigender Scangeschwindigkeit die Verweilzeit an einer Stelle. Es gehört zur Methode der Schnüffellecksuche, dass Luft und Prüfgas von der Messspitze mit einem gewissen Fluss angesaugt werden. Die gebräuchliche Einheit für den Gasstrom ist sccm (standard cubic centimeter per minute – Standardkubikzentimeter pro Minute). Herkömmliche Multi-Purpose-Lecksuchgeräte saugen das Gas mit einem Teilchenstrom von vergleichsweise geringen 60 sccm an.
Bei einer manuellen Schnüffellecksuche und sorgfältigem Vorgehen – langsam und in geringer Entfernung vom Prüfteil – kann dieser Teilchenstrom gegebenenfalls ausreichen. Bei der dynamischen Roboter-Schnüffellecksuche ist das nicht der Fall. Erst ein hoher Gasfluss sorgt dafür, dass Gas aktiv aus einem größeren Bereich angesaugt wird, sowohl aus der Tiefe als auch aus der Vorschubrichtung.
Prüfung auf Öldichtheit mit 3000 scccm
Soll die Öldichtheit einer Komponente sichergestellt werden, ist eine Prüfung gegen Leckraten im Bereich von 10-3 mbar × l/s erforderlich. Versuchsreihen belegen die Auswirkung der Scan- beziehungsweise Bewegungsgeschwindigkeit der Messsonde auf das Ergebnis. In unserem ersten Beispiel geht es um ein Testleck von 1 × 10-3 mbar × l/s bei einem Abstand von 6 mm vom Prüfteil. Diese Versuchsreihe zeigt, dass Multi-Purpose-Lecksuchgeräte, die Gas mit einem Fluss von nur 60 sccm ansaugen, hier vollkommen versagen. Ein Leck von 1 × 10-3 mbar × l/s identifizieren solche Geräte praktisch nie. Selbst wenn der Teilchenfluss des Geräts 300 sccm beträgt, ist es für solch ein Szenario ungeeignet.
Erst Geräte, die speziell mit einem Fluss von 3000 sccm ausgelegt sind (Protec P3000XL und LDS3000 mit XL-Schnüffeladapter), machen ein zuverlässiges, dynamisches Roboterschnüffeln möglich. Führt der Roboterarm die Messspitze dabei langsamer als mit circa 14 cm/s über die Prüfteil-Oberfläche, werden für Öldichtheit relevante Lecks zu 100 Prozent erkannt und lokalisiert. Bei Prüfgeschwindigkeiten von mehr als 14 cm/s nimmt die Nachweiswahrscheinlichkeit beim Protec P3000XL nach und nach ab. Der LDS3000XL hingegen kann selbst bei einer Geschwindigkeit von 30 cm/s ein Leck von 1 × 10-3 mbar × l/s noch zuverlässig nachweisen. Voraussetzung hierfür ist allerdings, dass man Helium statt Formiergas als Prüfgas verwendet.
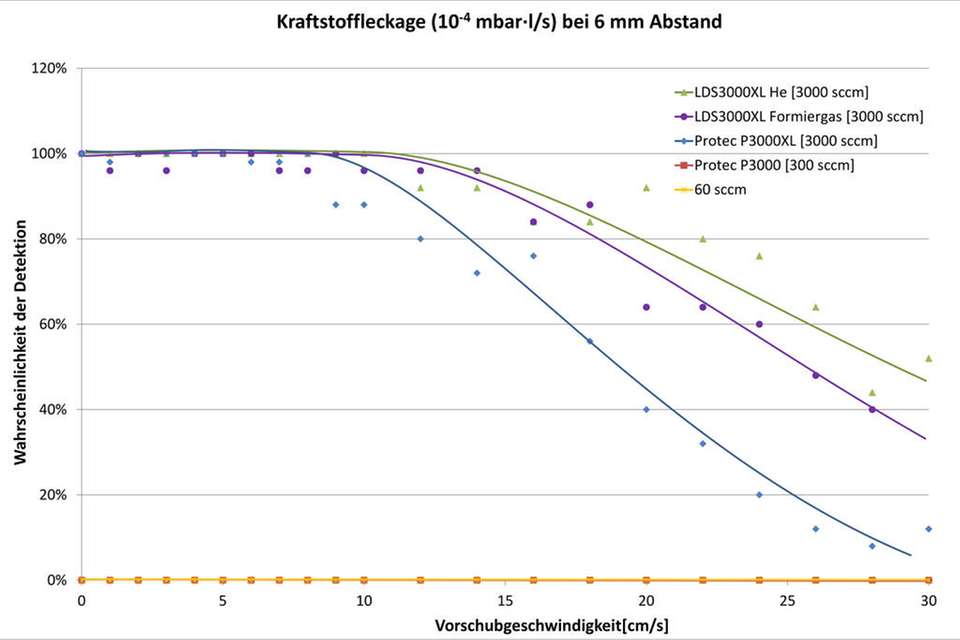
Anspruchsvolle Kraftstoffdichtheitsprüfung
Wenn im Automobilbau aus Komponenten keine flüssigen Kraftstoffe austreten dürfen, sind die Grenzleckraten nochmals kleiner: Sie liegen bei ungefähr 1 × 10-4 mbar × l/s. Entsprechend wachsen die technischen Anforderungen an die dynamische Roboter-Schnüffellecksuche. In unserer zweiten Versuchsreihe, wieder mit einem Abstand von 6 mm von der Oberfläche des Prüfteils, weisen nun Prüfgeräte mit 60 sccm und mit 300 sccm ein so kleines Leck in gar keinem Fall mehr nach, auch nicht bei einer sehr geringen Prüfgeschwindigkeit. Selbst bei einem Lecksuchgerät mit einem sehr hohen Gasfluss von 3000 sccm muss man die Geschwindigkeit nun reduzieren. Mit dem Protec P3000XL erbringt die dynamische Schnüffellecksuche bei Geschwindigkeiten unterhalb von circa 8 cm/s zuverlässige Ergebnisse mit Leck-Erkennungsraten von nahezu 100 Prozent. Der LDS3000XL gestattet hier sogar eine etwas höhere Geschwindigkeit von bis zu rund 10 cm/s.
Den Roboter am besten einhausen
Aber gegen welche Leckrate auch immer geprüft werden soll und ob es um Öl- oder Kraftstofflecks geht – es ist in jedem Fall sinnvoll, die Prüfanlage in einem abgeschirmten Bereich zu platzieren. Schon wegen Sicherheitserwägungen werden Roboterstationen oft eingehaust. Aber auch die dynamische Roboter-Schnüffellecksuche profitiert von der Einhausung, denn diese schirmt vor Luftbewegungen aus dem Produktionsbereich ab: Austretende Prüfgaswolken werden dann nicht sofort verweht.
Auswahl des passenden Lecksuchgeräts
Es ist die große Stärke der automatisierten Schnüffel-
lecksuche, dass sie den Einfluss eines menschlichen Prüfers vermeidet und zu klaren, reproduzierbaren Ergebnissen führt. Eine dynamische Roboter-Schnüffellecksuche macht es allerdings erforderlich, das Lecksuchgerät anhand des spezifischen Einsatzzwecks genau auszuwählen. Besonderes Augenmerk muss dabei einem sehr hohen Gasfluss gelten: 3000 sccm sind durchaus sinnvoll. Denn nur dann kann die dynamische Roboter-Schnüffellecksuche ihren Zweck erfüllen, Lecks automatisch zu identifizieren und zu lokalisieren – zuverlässig und sicher.