




Realtime-Ethernet-Netzwerke haben sich mittlerweile wegen ihrer hohen Datenraten und ihrer Synchronisationsmöglichkeiten in der Automatisierung etabliert und bilden eine der Grundlagen für Industrie 4.0. Dabei verfügen die einzelnen am Markt etablierten Protokolle über unterschiedliche Stärken und Anwendungsschwerpunkte. Dies hat unter anderem zur Konsequenz, dass die unterschiedlichen Komponenten von Fertigungsanlagen immer öfter über heterogene Netzwerkstrukturen miteinander kommunizieren. Zwei der dabei am häufigsten eingesetzt Protokolle sind Sercos und Ethercat. Sercos dank seiner guten Echtzeiteigenschaften, Ethercat aufgrund seiner flexiblen Topologie und der Vielzahl verfügbarer Komponenten.
Grenzen überwinden
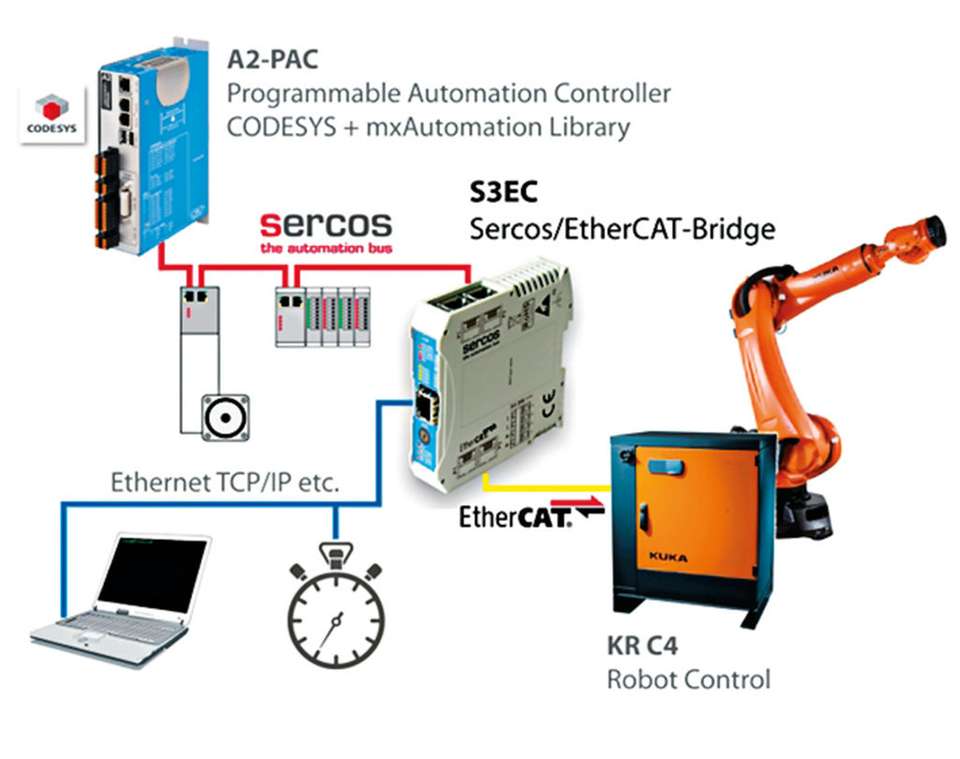
Eine typische Aufgabenstellung bei der Projektierung von Fertigungsanlagen mit heterogenen Netzwerken ist die Integration von Robotern. Sie übernehmen zum Beispiel das Produkthandling in Verpackungslinien und kommunizieren dazu mit vor- und nachgelagerten Stationen. Für die Überbrückung der Netzwerkgrenzen bietet sich die kompakte S3EC-Sercos/Ethercat-Bridge von Cannon-Automata an. Die Robotersteuerung Kuka KR C4 mit ihrem Ethercat-Interface kann darüber mit dem Sercos Master-Interface von Steuerungen verschiedener Hersteller gekoppelt werden. Die wichtigste Voraussetzung dafür ist die konsistente und synchrone Übertragung der Echtzeitdaten. Die Baugruppe bietet diese Eigenschaft selbst bei großen Datenmengen.
Die Länge der bidirektional übertragenen Echtzeitdaten kann im Bereich von 32 Byte bis 1024 Byte variiert werden, per Drehschalter an der Modulfront oder durch Parametrierung im Engineeringtool. Die minimale Zykluszeit am Sercos-Bus beträgt 250 µs, damit ist ein Einsatz des Moduls selbst in Highspeed-Anwendungen problemlos möglich. Die Ethercat-Seite des Gerätes kann im FreeRun/SM2-Synchron-Mode betrieben werden, oder im DC-Synchron-Mode, wodurch Ethercat- und Sercos taktsynchron laufen.
Bei der Kopplung von zwei Bussen ist es wichtig, dass beide Master zu jeder Zeit über den Status der jeweils anderen Seite informiert sind. Nur so ist es möglich, unverzüglich auf Fehlerereignisse wie Kommunikationsunterbrechungen oder auf Änderungen des Kommunikationsstatus zu reagieren. Dazu stellt die S3EC-Baugruppe sowohl dem Sercos- als auch dem Ethercat-Master umfangreiche Diagnoseinformationen über den jeweils anderen Bus zur Verfügung. Diese Daten werden zyklisch als Teil der Echtzeitdaten übertragen. Applikationen können so sehr einfach eine problemlose Koordination der beiden Busse und der daran angeschlossenen Geräte sicherstellen. Neben der zyklischen Kommunikation über die Echtzeitdaten können die beiden Master auch azyklisch bidirektional auf Parameter des anderen Busses zugreifen: Sercos über den Servicekanal (SVC), Ethercat auf Basis des CoE-Protokolls.
Funktionsbibliothek inklusive
Über die für beide Protokolle mitgelieferten Gerätebeschreibungsdateien kann die Sercos/Ethercat-Bridge einfach in die jeweilige Buskonfigurationen integriert werden. Obwohl sich die Baugruppe dadurch an beiden Bussen als I/O-Device abbildet, werden die übertragenen Daten nicht als Ersatz für die bisher fest verdrahteten E/A-Signale verwendet. Die bis zu 1024 Byte langen I/O-Daten werden bidirektional übertragen und beinhalten Datenstrukturen zur Kommandierung und Diagnose des Roboters. Der Anwendungsprogrammierer kommt jedoch bei der Beauftragung von Roboterbewegungen oder beim Abrufen von Statusinformationen mit diesen komplexen Datenstrukturen nicht in Berührung. Die von Kuka für Codesys und andere Plattformen angebotene mxAutomation-Library setzt direkt auf den Echtzeitdaten auf und bildet sie in Form von Funktionsaufrufen auf der Anwendungsebene ab.
Diese Integrationsmethode bietet gegenüber der bisher üblichen I/O-Schnittstelle wesentliche Vorteile. Die Roboterprogrammierung erfolgt in den bekannten und standardisierten IEC-61131 Sprachen. Eine eigene Robotersprache muss der Applikationsentwickler dazu nicht mehr erlernen. Trotz der Verlagerung der Programmierung in die übergeordnete Steuerung verbleiben aber wichtige Roboterfunktionen in der KR-C4-Steuerung von Kuka. Zu nennen sind hier Aufgaben wie Justage, Bewegungsplanung, Regelung, Sicherheitsfunktionen und Synchronisierungsaufgaben. Ebenfalls von Vorteil ist, dass Bedienung und Diagnose des Roboters auf dem Bedienpanel der Maschinen- oder Anlagensteuerung ausgeführt werden können. Das für Roboter typische Handheld-Panel wird dadurch überflüssig.
Standard-Ethernet integriert
Neben den jeweils zwei RJ45-Buchsen für Sercos und Ethercat ist die S3EC-Baugruppe mit einem zusätzlichen Standard-Ethernet-Port ausgestattet. Über dieses Interface können daran angeschlossene Geräte durch Nutzung der von den beiden Echtzeit-Bussen hierfür vorgesehenen Mechanismen wie UC-Channel und EoE-Protokoll mit anderen Busteilnehmern kommunizieren.





.jpg "Panel-PCs als HMI für Mess-, Steuer und Regelaufgaben")




