Im Bestreben, innovative Produkte mit hoher Funktionalität schnell auf den Markt zu bringen, werden adaptive Software-Lösungen immer wichtiger. Denn modellbasiertes Design und der Umgang mit großen Datenmengen, wie sie mit Industrie 4.0 und Big Data in das Tagesgeschäft einfließen, erfordern mathematisch-wissenschaftliche Lösungsansätze. Diese sind mit einer klassischen SPS-Programmierung nur schwer darstellbar. Daher baut Bosch Rexroth hier eine Brücke zur IT-Welt: Der Antriebs- und Steuerungsspezialist bindet die Entwicklungs- und Simulationsumgebungen Matlab und Simulink des internationalen Softwareanbieters MathWorks an sein Open-Core-Engineering-Portfolio an.
Matlab und Simulink in der Automatisierung
Bereits der erste Teil der Entwicklungsplattform, die Modellierungsumgebung Matlab, hält für Maschinenbauer interessante Anwendungsfelder bereit. So lassen sich nicht nur neue Steuerungsalgorithmen schnell entwickeln und diese als Applikation bereitstellen, sondern auch große Mengen an Produktions- und Maschinendaten analysieren und visualisieren – etwa für Predictive-Maintenance-Ansätze. Die Simulationsumgebung Simulink gestattet darüber hinaus eine virtuelle Inbetriebnahme der Steuerungen parallel zur oder vor der Hardware-Montage. Insbesondere Hersteller von Testständen für Motoren oder Mechanik können damit Extremsituationen simulieren, ohne die Hardware zu gefährden. Darüber hinaus enthält Simulink eine GUI-Toolbox (Graphical User Interface, deutsch: Graphische Benutzerschnittstelle) mit der sich komplette HMIs zur Maschinenbedienung gestalten lassen.
Beim Rapid Control Prototyping, einem Teilkomplex des modellbasierten Engineerings, testen beziehungsweise simulieren die Entwickler ihre in Simulink erstellten Modelle, bis sie reif für die produktive Anwendung sind. Weil dies über das Open Core Interface nun direkt in Echtzeit oder als „Hardware in the Loop“ auf der Maschinensteuerung möglich ist, kann der Anwender innerhalb der Entwicklungsschritte beliebig vor und zurück navigieren. So lassen sich mitunter physikalische Randbedingungen umgehend im Algorithmus oder gar im Modell ausgleichen, beispielsweise die Schwingung eines Greifers in einem Pick-and-Place-Roboter. Zur gezielten Fehleranalyse können darüber hinaus noch im Produktivbetrieb Störimpulse simuliert und so gefahrlos die Reaktion des realen Systems ermittelt werden.
Um die Modellsimulation mit ihren Algorithmen an die Hardware des Steuerungssystem IndraMotion MLC anzubinden, sind nur wenige Befehle nötig. Danach liest Matlab die Zustände der Steuerung nebst Peripheriesignalen in Echtzeit aus. Entwickler können damit selbst komplexe Bewegungsabläufe einfach an der Maschine programmieren, ohne zwingend SPS-Code erstellen zu müssen. Nichtsdestotrotz können sie auch SPS-Programme in ihr Modell integrieren und direkt damit kommunizieren – etwa um im Rahmen eines Stresstests deren Robustheit gegen eingebrachten Fehlerzustände zu prüfen. Dabei kann der Anwender jederzeit zwischen SPS-Code und Hochsprache wechseln. Die letztliche Überführung der Applikation in das Echtzeitsystem der Steuerung gelingt mit dem von MathWorks entwickelten Simulink C oder (C/C++) oder PLC Coder (IEC 61131-3 konformer SPS-Code).
Direkter Austausch mit der Steuerung
Für den direkten Zugriff auf die Steuerungsfunktionen der Rexroth-Hardware müssen Matlab- und Simulink-Anwender nur die passenden Bibliotheken in Form eines Software Development Kit (SKD) installieren. Danach können sie sofort die ersten Befehle austesten. Um etwa eine Achse direkt aus Matlab heraus zu verfahren, wird in der Kommandokonsole oder per m-File einfach der Befehl „m4MMotionMoveAbsolute“ aufgerufen und parametriert. Zur Orientierung und Unterstützung hat Bosch Rexroth jeder der insgesamt mehr als 500 Bibliotheksfunktionen eine Beschreibung sowie Hilfen zu den Aufrufparametern zur Seite gestellt. Zusätzlich stehen direkt ausführbare Beispielapplikationen zur Verfügung.
Mit der Ausweitung von Open Core Engineering auf Matlab und Simulink macht Bosch Rexroth die Einsparpotenziale von modellbasiertem Design, Rapid Control Prototyping und virtueller Inbetriebnahme greifbar. Die ausführliche Dokumentation mit praktischen Beispielen erleichtert den Einstieg.
Erfahrene Anwender profitieren dabei von der Möglichkeit, neue Algorithmen zu entwerfen, Modellsimulationen zu testen, Applikationen und SPS-Programme zu prüfen oder Steuerungen effizient und sicher in Betrieb zu nehmen. Ergänzende Analyse- und Visualisierungsfunktionen für neue Geschäfts- und Service-Modelle erweitern das Anwendungsspektrum in Richtung Industrie 4.0 und Big Data.
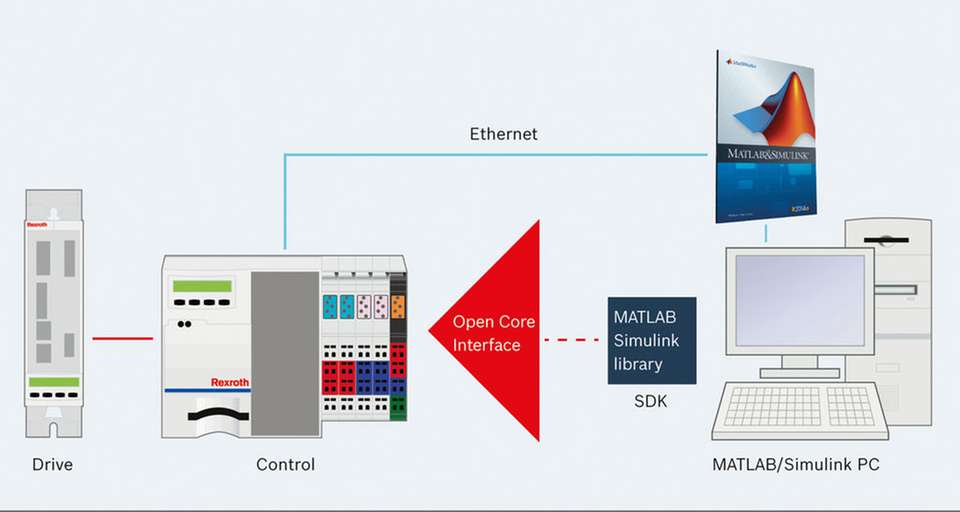
Eingefangen: Open Core Interface
Die Schnittstellentechnologie Open Core Interface von Bosch Rexroth versetzt Anwender in die Lage, im Rahmen von Open Core Engineering mittels Hochsprachen direkt auf die Funktionen des Steuerungssystems IndraMotion MLC zuzugreifen. Die Anbindung an die jeweilige Entwicklungsumgebung erfolgt über ein passendes Software Development Kit (SDK). Das über 500 Bibliotheksfunktionen umfassende SDK für Matlab und Simulink steht – neben vielen weiteren SDKs für andere Entwicklungsumgebungen – im Engineering Network von Bosch Rexroth zum Download bereit.