Nach Angaben des Branchenverbandes IFR (International Federation of Robotics) wurden im Jahr 2014 weltweit über 200 000 Roboter verkauft – ein neuer Rekord. Die Unternehmensberatung Boston Consulting erwartet, dass sich das jährliche Marktvolumen für Industrieroboter bis 2025 noch einmal mehr als verdoppeln wird. Eine wesentliche Ursache besteht aber auf jeden Fall darin, dass roboterbasierte Automatisierungslösungen längst nicht mehr auf Standardaufgaben in der verarbeitenden Industrie beschränkt sind. Vielmehr erobert die Robotik immer neue Bereiche.
Trend 1: Neue Anwendungsfelder
In Japan, dem Mutterland der Robotik, setzen Institute in der Pharmaforschung und -entwicklung schon seit einigen Jahren auf speziell für den Einsatz im Labor konzipierte Roboter. Mit Erfolg: Vergleichende Studien aus der japanischen Biomedizin beweisen, dass die Qualität und Reproduzierbarkeit der Arbeitsergebnisse eines Roboters im Vergleich mit Laborassistenten nicht nur besser sind. Seine Exaktheit schafft auch ganz neue Voraussetzungen für die Forschung an Ausgangssubstanzen, deren Erzeugung bisher nicht ausreichend prozesssicher oder reproduzierbar möglich war. Dabei erfüllen Roboter ihre Aufgaben nicht nur mit äußerster Präzision, sondern 24 Stunden am Tag – und auch da, wo es für den Menschen aufgrund der verwendeten Substanzen gefährlich werden kann. Roboterhersteller tragen den spezifischen Anforderungen der Life-Science-Branche mit neuen, flexiblen und leistungsfähigen Robotermodellen Rechnung. Eine wichtige Rolle spielen dabei zweiarmige Kinematiken. Ein solcher menschenähnlicher Dualarmroboter ist dank multifunktionaler Werkzeuge und Greifer ausgesprochen vielseitig einsetzbar. Er arbeitet mit nahezu jeder vorhandenen Standard-Laborausrüstung und ist in der Lage mit herkömmlichen Analysegeräten umzugehen, wie sie von Handarbeitsplätzen her bekannt sind.
Doch auch in der Automotive-Branche, wo der Siegeszug der Industrierobotik in den 1960er-Jahren begann, finden sich noch immer neue Anwendungsbereiche: Während der Automationsgrad beim Schweißen und Lackieren inzwischen bei 90 Prozent liegt, gibt es beispielsweise in der Endmontage noch viel Potenzial. Allerdings ist die komplette Automatisierung komplexer Aufgaben wie etwa der Radmontage technisch schwierig und deshalb mit Risiken verbunden: So muss das System Position und Ausrichtung des Fahrzeugs sehr genau kennen. Ebenso muss die Radstellung genau vermessen werden. Daher ist hier eine aufwändige Bildverarbeitung und Sensorik notwendig. Die Radmontage kann damit zwar vollautomatisiert erfolgen. Doch sobald ein Sensor ausfällt, steht praktisch die ganze Linie. Japanische Automobilhersteller, die eine solche vollautomatische Radmontage erprobten, haben diesen Weg deshalb nicht weiter verfolgt.
Die Lösung könnte dagegen in einer Teilautomatisierung liegen. Das heißt konkret: in der Unterstützung der Mechaniker durch einen Roboter. Dieser trägt dann die schweren Räder bis zum Fahrzeug, wo der Mitarbeiter die Feinpositionierung übernimmt. Schon in wenigen Jahren können solche Szenarien Realität werden. Entsprechende Robotermodelle sind bereits verfügbar. Die besondere technische Herausforderung liegt jedoch darin, den gemeinsamen Arbeitsbereich von Mensch und Roboter sicher zu gestalten.
Trend 2: Mensch-Roboter-Kollaboration
Ein Weg, beim direkten Kontakt zwischen Mensch und Roboter höchste Sicherheitsstandards zu gewährleisten, sind entsprechende Safety-Features in der Robotersteuerung. Die neueste Steuerungsgeneration von Yaskawa ist im Hinblick darauf bereits mit erweiterten Sicherheitsfunktionen ausgestattet: Ein integrierter Safety Controller macht sie zu einer kompletten Funktionalen Sicherheitssteuerung (FSU) der Kategorie 3. So lässt sich der Arbeitsraum des Roboters mit bis zu 32 festlegbaren Sicherheitszonen softwaretechnisch begrenzen. Nähert sich der Manipulator oder der Effektor dem definierten Sicherheitsbereich, wird der Roboter durch Lichtschranken abgebremst bis hin zum Stillstand. Für eine Mensch-Roboter-Kollaboration bedeutet das: Wenn der Bediener in Interaktion mit dem Werkzeug tritt, steht der Roboter entweder sicher oder bewegt sich im Rahmen der gesetzlichen Regeln langsam in Sicherheitsgeschwindigkeit.
Über die Sicherheit hinaus ist eine einfache, möglichst intuitive Programmierbarkeit des Roboters Voraussetzung für eine funktionierende Mensch-Roboter-Kollaboration. Vereinfacht gesagt: Der Roboter muss schnell und einfach neue Arbeitsabläufe hinzulernen können. Die Basis dafür bildet beispielsweise eine Programm-Bibliothek, in der typische Bewegungen als Module hinterlegt sind. Der Bediener komponiert und parametriert mit Hilfe einer übergeordneten Scheduling-Software lediglich die einzelnen Prozessschritte seiner gewünschten Arbeitsfolge. Ein weiteres Programmierungskonzept an der Schnittstelle zwischen Mensch und Roboter ist das so genannte Kinetic Teaching. Der Anwender führt dabei den Roboterarm beziehungsweise das Werkzeug manuell in die gewünschte Position. Über eine Schnittstelle können die Positionsdaten dann direkt in die Steuerung übernommen werden.
Trend 3: Industrie 4.0
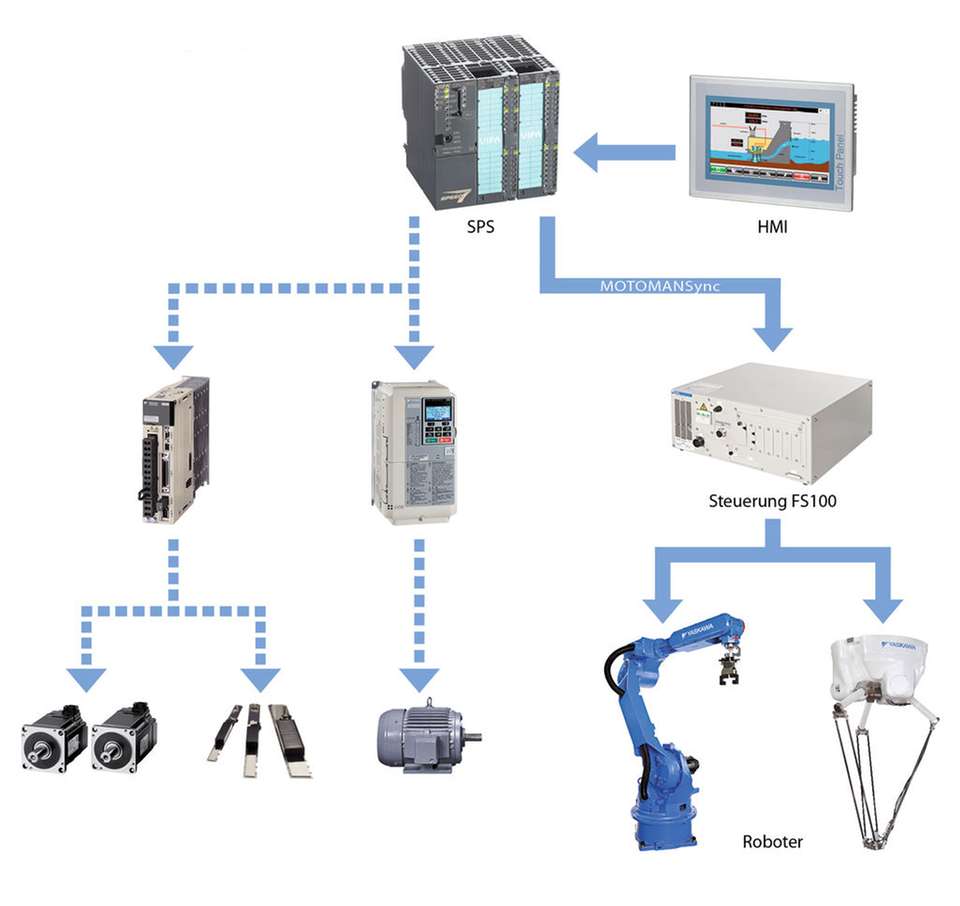
Gerade im Zeichen von Industrie 4.0 gewinnen auch noch andere Programmierungs- und Steuerungskonzepte an Bedeutung. Als Beispiel kann die Einbindung der Robotersteuerung (Controller) in die übrige Anlagenumgebung dienen. Generell ist dabei die Verknüpfung von allen Einzelkomponenten denkbar und technisch möglich. In einem Industrie4.0-fähigen Kommunikations-Szenario kann sogar die komplette Programmierung der Robotersteuerung direkt in der SPS erfolgen.
Möglich macht dies die Schnittstelle MotomanSync. Sie verknüpft die offen konzipierte Robotersteuerung per Ethernet/IP oder Profinet mit der SPS. Dabei werden keine Daten übertragen wie bei einer üblichen I/O. Die Programmierung wird vielmehr direkt im PC oder der SPS durchgeführt. Von dort gehen die Bewegungsbefehle in Echtzeit an den Roboter. Das Protokoll unterstützt dabei verschiedene SPS-Marken sowie den Anschluss an einen PC. Eine Demozelle zeigt die Möglichkeiten einer solchen Lösung anschaulich: Die Programmierung des Roboters ist direkt aus der SPS möglich. Die Bedienung des Roboters erfolgt über das Bedienfeld (HMI) der Steuerung. Gleichzeitig illustriert diese Beispielanlage den Ansatz von technisch einheitlichen Total System Solutions.
Weitere Informationen zu Yaskawa finden Sie im Business-Profil auf Seite 55.